Yi Jiangang, Liu Peng, Gao Jun, Yuan Rui, Wu Jiajun
State Key Laboratory of Precision Blasting, Jianghan University, Wuhan, 430056, China.
Hubei Key Laboratory of Industrial Fume and Dust Pollution Control, Jianghan University, Wuhan, 430056, China.
Sci Rep. 2024 Nov 18;14(1):28425. doi: 10.1038/s41598-024-77034-0.
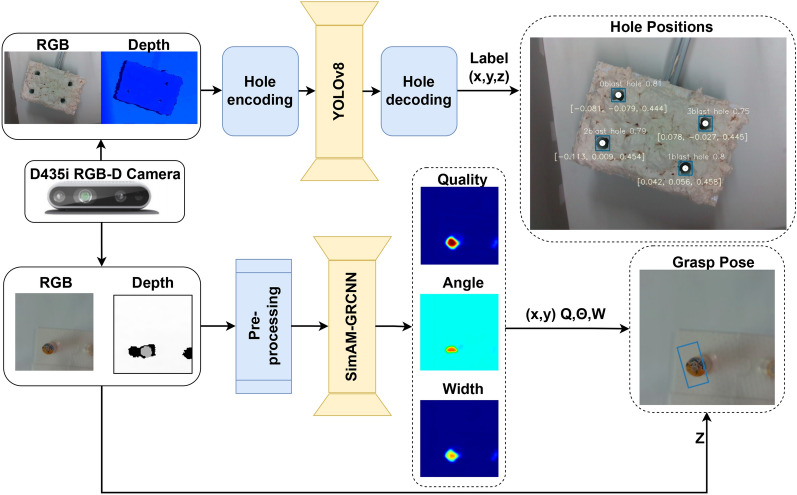
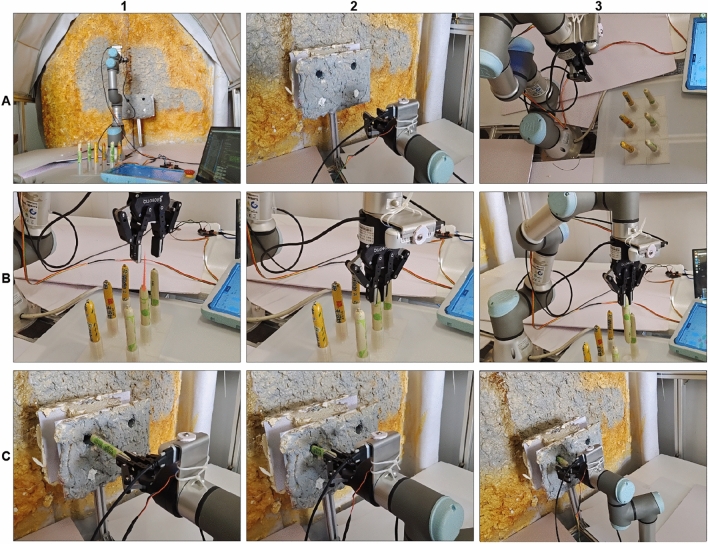
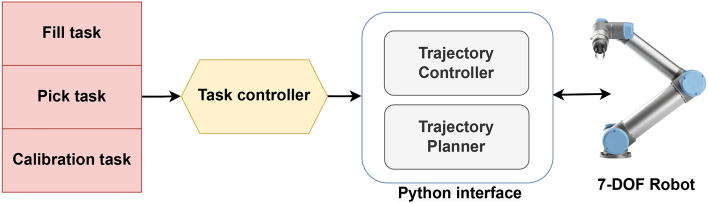
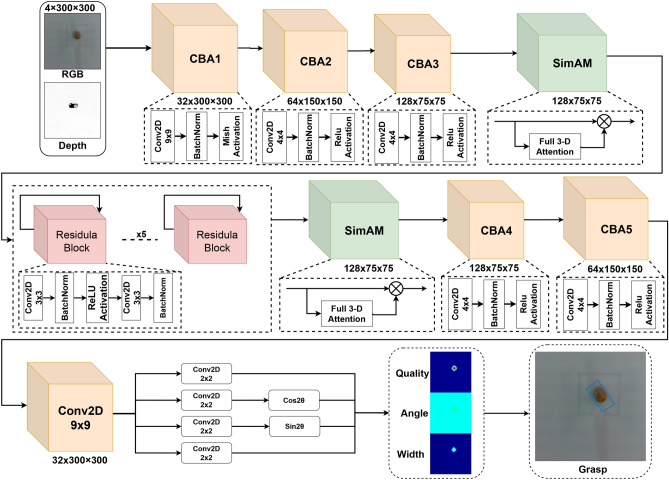
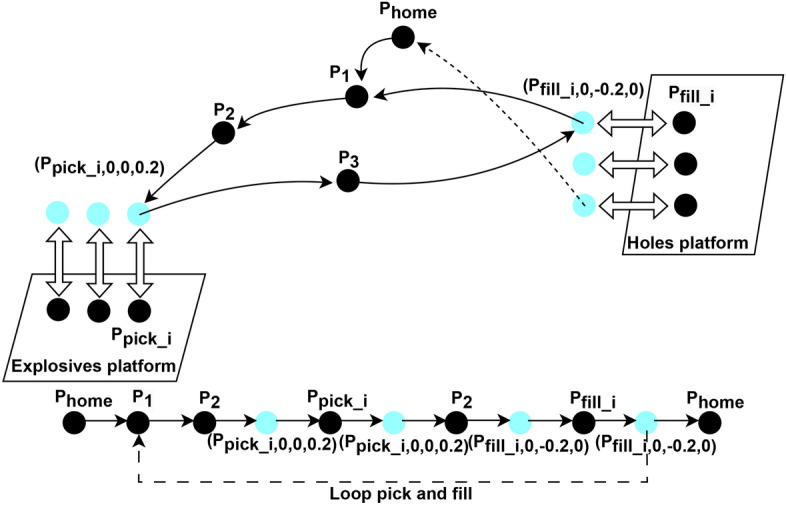
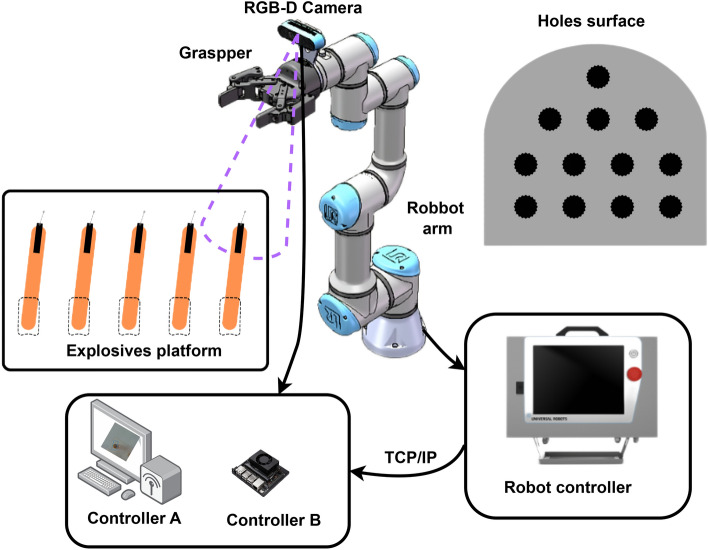
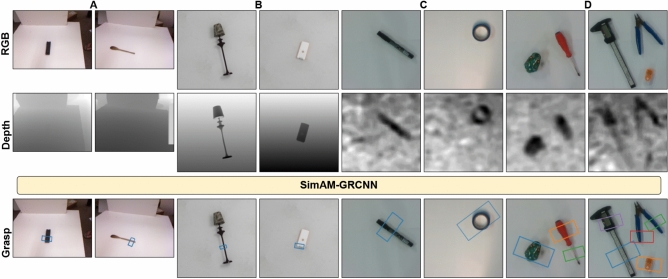
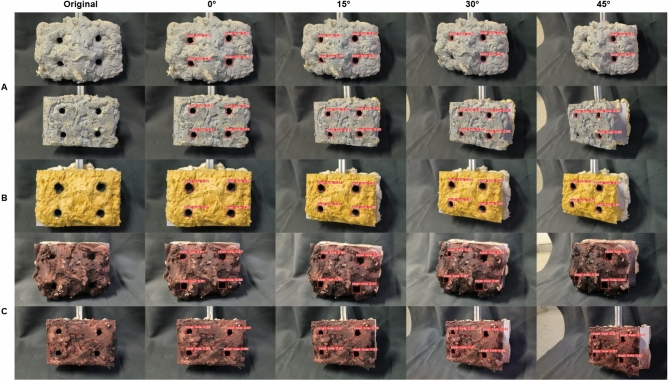
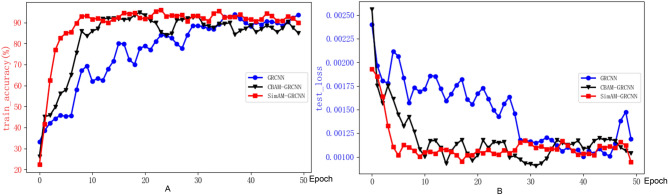
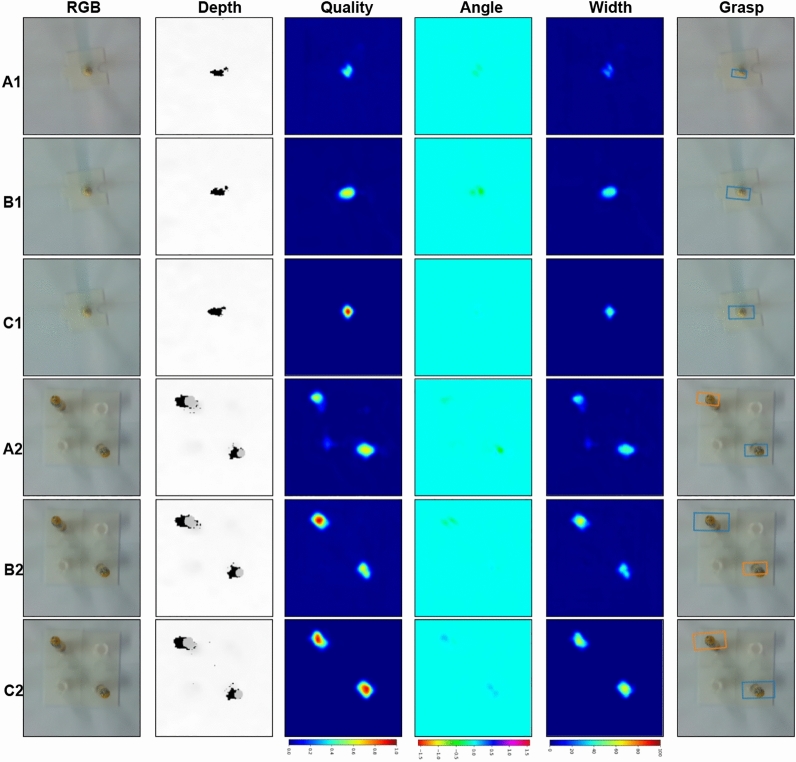
For the blasting scenario, our research develops an emulsion explosive grasping and filling system suitable for tunnel robots. Firstly, we designed a system, YOLO-SimAM-GRCNN, which consists of an inference module and a control module. The inference module primarily consists of a blast hole position detection network based on YOLOv8 and an explosive grasping network based on SimAM-GRCNN. The control module plans and executes the robot's motion control based on the output of the inference module to achieve symmetric grasping and filling operations. Meanwhile, The SimAM-GRCNN grasping network model is utilized to carry out comparative evaluated on the Cornell and Jacquard dataset, achieving a grasping detection accuracy of 98.8% and 95.2%, respectively. In addition, on a self-built emulsion explosive dataset, the grasping detection accuracy reaches 96.4%. The SimAM-GRCNN grasping network model outperforms the original GRCNN by an average of 1.7% in accuracy, achieving a balance between blast holes detection, grasping accuracy and filling speed. Finally, experiments are conducted on the Universal Robots 3 manipulator arm, using distributed deployment and manipulator arm motion control mode to achieve an end-to-end grasping and filling process. On the Jetson Xavier NX development board, the average time consumption is 119.67 s, with average success rates of 87.1% for grasping and 79.2% for filling emulsion explosives.
对于爆破场景,我们的研究开发了一种适用于隧道机器人的乳化炸药抓取与装填系统。首先,我们设计了一个名为YOLO-SimAM-GRCNN的系统,它由推理模块和控制模块组成。推理模块主要由基于YOLOv8的炮孔位置检测网络和基于SimAM-GRCNN的炸药抓取网络组成。控制模块根据推理模块的输出规划并执行机器人的运动控制,以实现对称抓取和装填操作。同时,利用SimAM-GRCNN抓取网络模型在康奈尔数据集和雅卡尔数据集上进行对比评估,抓取检测准确率分别达到98.8%和95.2%。此外,在自建的乳化炸药数据集上,抓取检测准确率达到96.4%。SimAM-GRCNN抓取网络模型在准确率上比原始GRCNN平均高出1.7%,在炮孔检测、抓取准确率和装填速度之间实现了平衡。最后,在通用机器人3机械手手臂上进行实验,采用分布式部署和机械手手臂运动控制模式实现端到端的抓取和装填过程。在Jetson Xavier NX开发板上,平均耗时119.67秒,抓取乳化炸药的平均成功率为87.1%,装填的平均成功率为79.2%。