Song Chunyu, Guo Teer, Sui Jianghua
Navigation and Ship Engineering College, Dalian Ocean University, 116023, Dalian, China.
Sci Rep. 2024 Dec 6;14(1):30418. doi: 10.1038/s41598-024-80712-8.
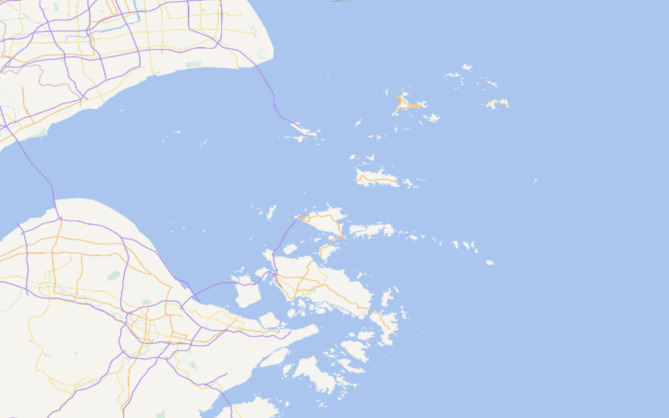
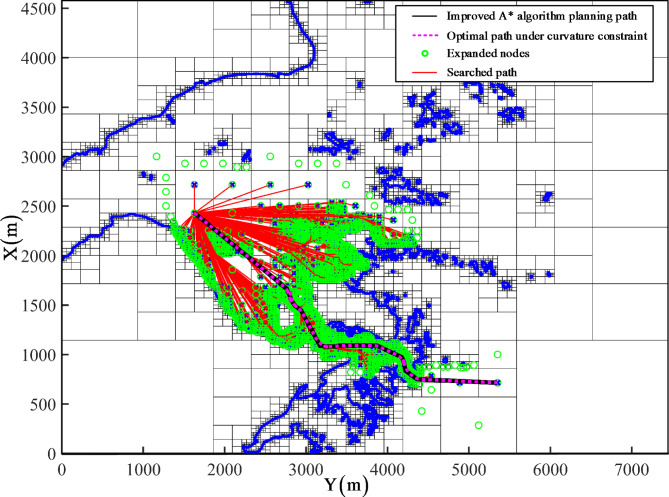
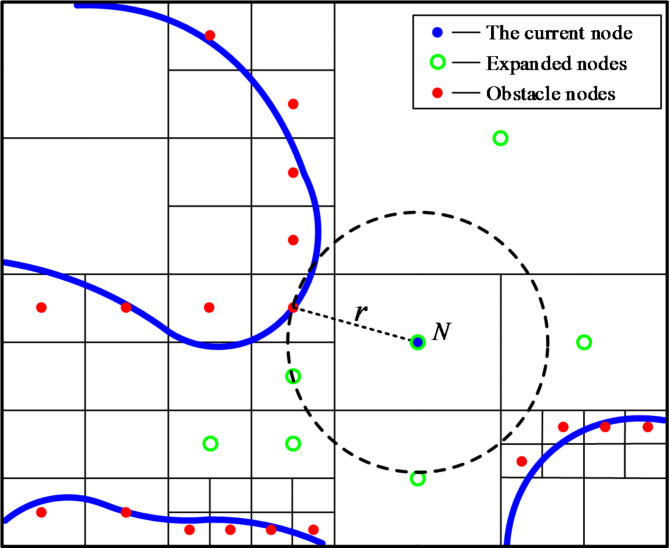
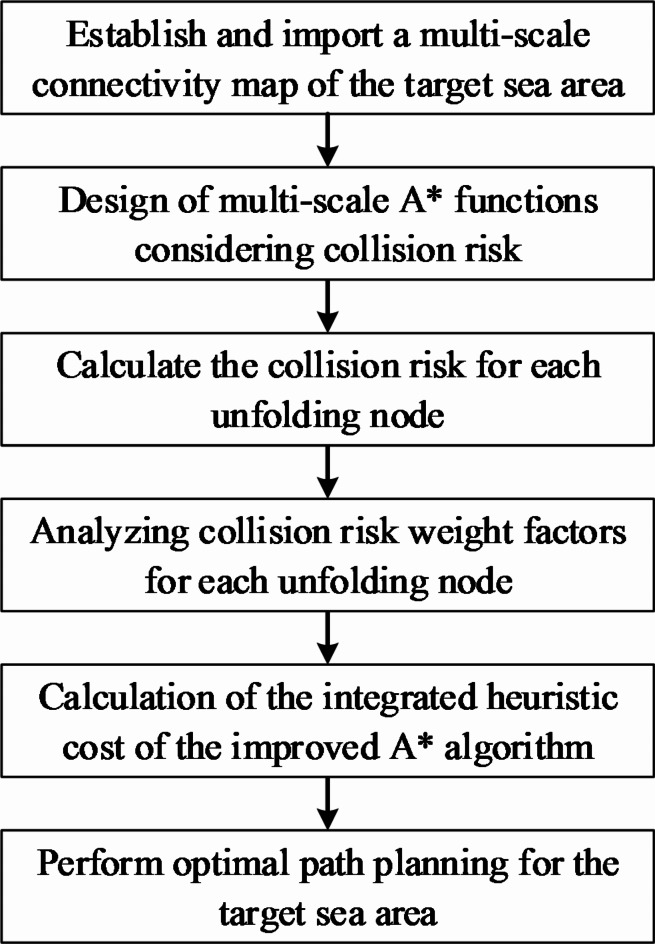
To improve the safety of ship navigation in complex sea areas and reduce planning time while achieving optimal path planning. The paper proposes an improved A* algorithm that incorporates ship collision risk assessment. The paper utilizes multi-scale raster maps to divide the sea chart in the context of complex sea areas, and combines the Line-of-sight (LOS) algorithm to solve the zigzag paths that may appear in this planning context. Moreover, in order to improve the efficiency of optimal path planning in the context of complex sea areas while ensuring path safety, the paper proposes a collision risk function to optimize the determination of the cost of A* algorithm nodes, thereby enhancing the heuristic function of the A* algorithm. The improved A* algorithm can consider both path length and collision risk to plan the optimal path and to enhance the overall quality of the planning results. To verify the advantages of the improved algorithm proposed in the paper, the Zhoushan Islands sea area with complex environment is selected as the planning background for simulation study. The results show that the improved algorithm with the introduction of the collision risk function reduces the path planning time, the number of expanded nodes, and the path length by 30%, 11%, and 5.8%, respectively, compared with the original algorithm, which can effectively reduce the computational burden of the algorithm. This study provides a relatively complete and scientific route planning strategy for the study of the safe navigation of smart ships in complex sea areas.
为提高复杂海域船舶航行安全,减少规划时间并实现最优路径规划。本文提出一种结合船舶碰撞风险评估的改进A算法。利用多尺度栅格地图在复杂海域背景下划分海图,并结合视线(LOS)算法解决该规划背景下可能出现的曲折路径。此外,为在确保路径安全的同时提高复杂海域背景下最优路径规划的效率,本文提出一种碰撞风险函数来优化A算法节点代价的确定,从而增强A算法的启发式函数。改进的A算法能够兼顾路径长度和碰撞风险来规划最优路径,提高规划结果的整体质量。为验证本文提出的改进算法的优势,选取环境复杂的舟山群岛海域作为规划背景进行仿真研究。结果表明,引入碰撞风险函数后的改进算法与原算法相比,路径规划时间、扩展节点数和路径长度分别减少了30%、11%和5.8%,能有效降低算法的计算负担。本研究为复杂海域智能船舶安全航行研究提供了一种相对完整且科学的航线规划策略。