Osburg Jonas, Nguyen Ngoc Thinh, Ernst Floris
Insitute for Robotics and Kognitive Systems, University of Luebeck, Luebeck, Germany.
Int J Med Robot. 2025 Feb;21(1):e70037. doi: 10.1002/rcs.70037.
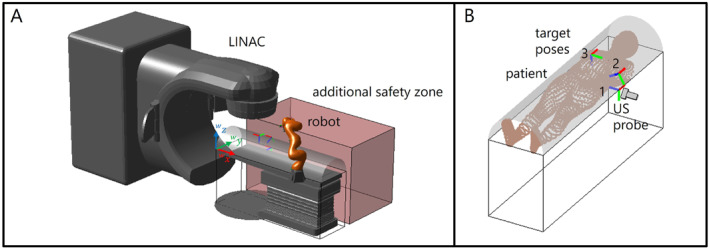
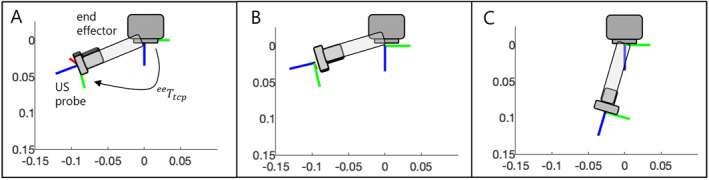
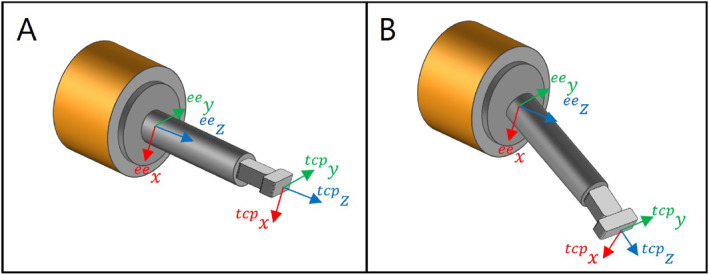
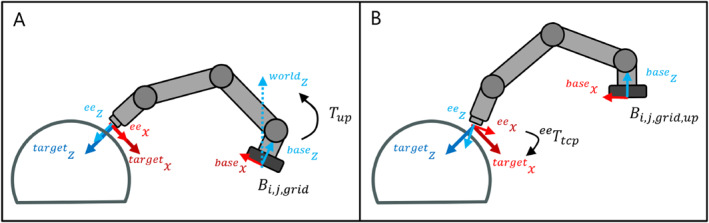
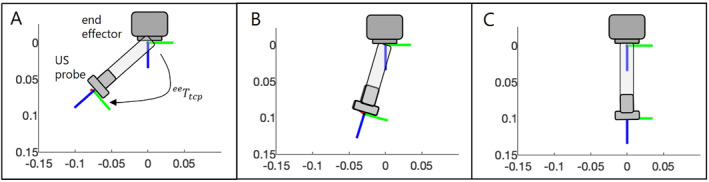
Robotic ultrasound visualises internal organs in real-time for various medical applications without the harm of X-rays. The ultrasound probe is attached to the robot's end effector using custom-developed probe holders. This paper analyzes the impact of different probe holder geometries on the robot's base placement and reachability.
We propose a method to improve probe holder geometries and robot base placements to enhance reachability, validated using a 7-DoF serial manipulator (KUKA iiwa 7) for ultrasound scans of multiple subcutaneous body parts.
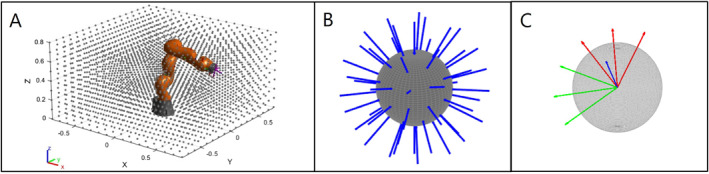
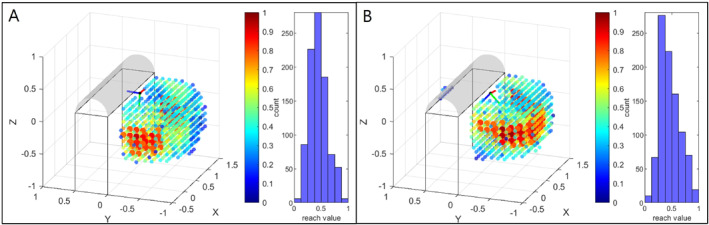
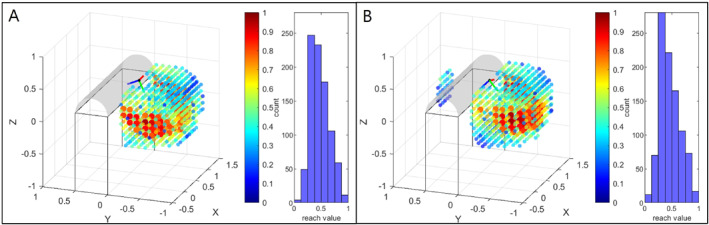
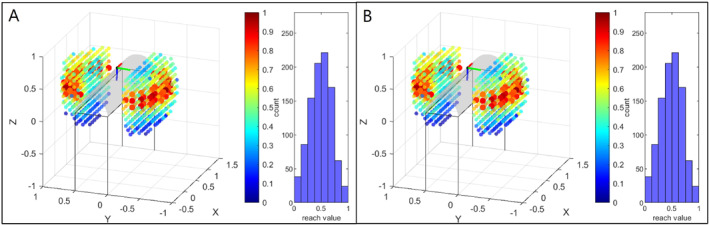
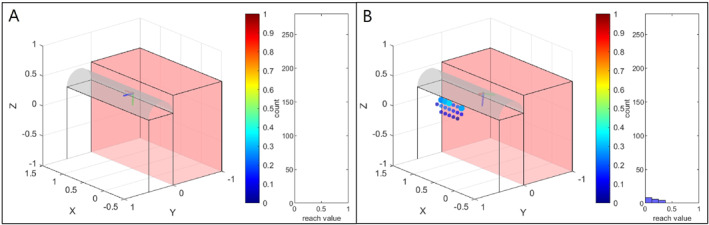
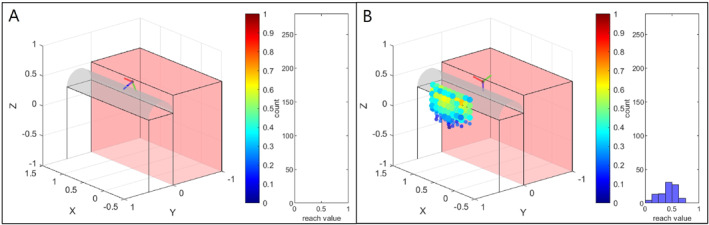
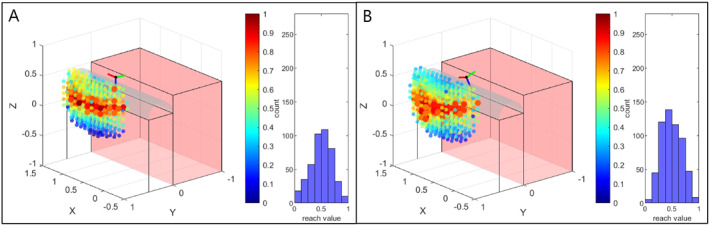
Without additional space restrictions, the number of robot base positions with high reachability could be strongly increased with an improved probe holder geometry. Under space constraints, previously unreachable target poses became accessible by adapting the probe holder geometry.
Our method provides an automated solution for determining improved probe holder geometries, enhancing reachability to target areas, especially when the robot's placing area is limited.
机器人超声可为各种医学应用实时可视化内部器官,且无X射线危害。超声探头通过定制开发的探头固定器连接到机器人的末端执行器。本文分析了不同探头固定器几何形状对机器人基座放置和可达性的影响。
我们提出一种改进探头固定器几何形状和机器人基座放置以提高可达性的方法,并使用7自由度串联机械手(库卡iiwa 7)对多个皮下身体部位进行超声扫描进行验证。
在没有额外空间限制的情况下,改进探头固定器几何形状可大幅增加具有高可达性的机器人基座位置数量。在空间受限的情况下,通过调整探头固定器几何形状可实现之前无法到达的目标姿态。
我们的方法提供了一种自动解决方案,用于确定改进的探头固定器几何形状,增强对目标区域的可达性,特别是在机器人放置区域有限时。