Bruel Alice, Bacha Lina, Boehly Emma, De Trogoff Constance, Represa Luca, Courtine Gregoire, Ijspeert Auke
Biorobotics Laboratory, EPFL, Lausanne, Switzerland.
NeuroRestore, EPFL, Lausanne, Switzerland.
PLoS Comput Biol. 2025 Jan 6;21(1):e1012069. doi: 10.1371/journal.pcbi.1012069. eCollection 2025 Jan.
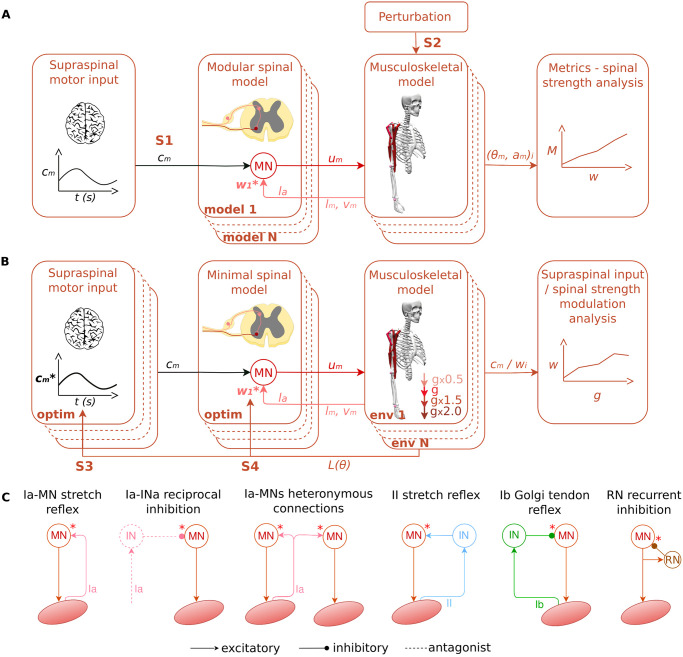
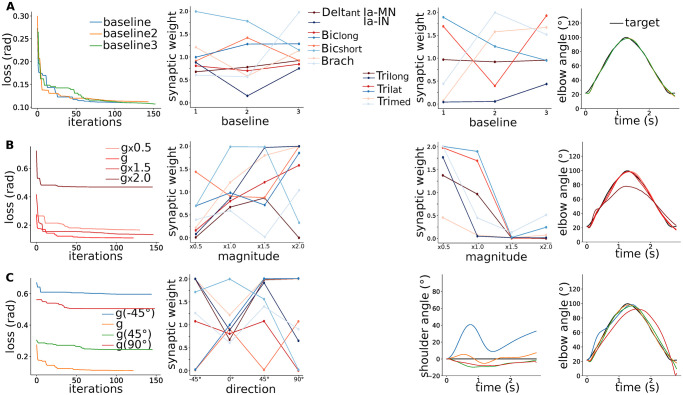
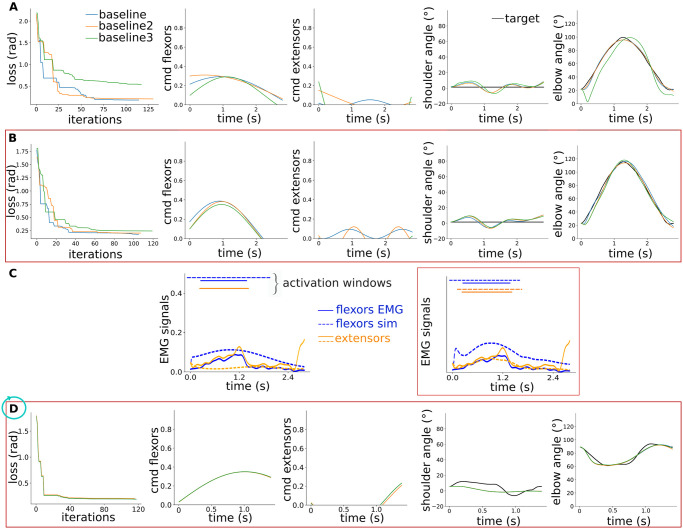
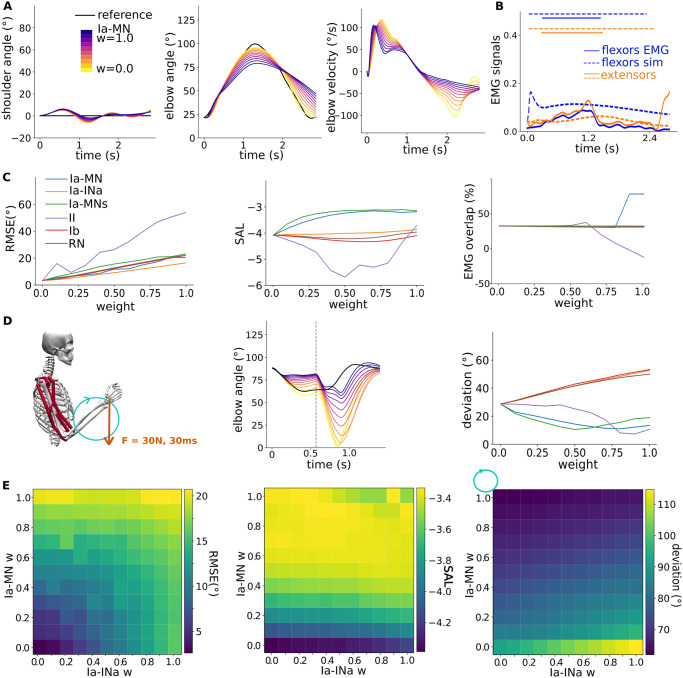
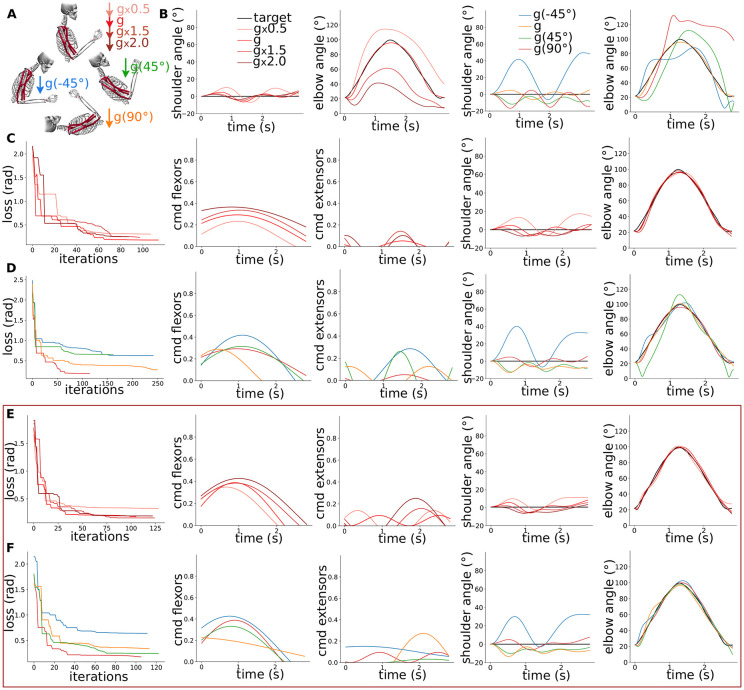
Humans can perform movements in various physical environments and positions (corresponding to different experienced gravity), requiring the interaction of the musculoskeletal system, the neural system and the external environment. The neural system is itself comprised of several interactive components, from the brain mainly conducting motor planning, to the spinal cord (SC) implementing its own motor control centres through sensory reflexes. Nevertheless, it remains unclear whether similar movements in various environmental dynamics necessitate adapting modulation at the brain level, correcting modulation at the spinal level, or both. Here, we addressed this question by focusing on upper limb motor control in various gravity conditions (magnitudes and directions) and using neuromusculoskeletal simulation tools. We integrated supraspinal sinusoidal commands with a modular SC model controlling a musculoskeletal model to reproduce various recorded arm trajectories (kinematics and EMGs) in different contexts. We first studied the role of various spinal pathways (such as stretch reflexes) in movement smoothness and robustness against perturbation. Then, we optimised the supraspinal sinusoidal commands without and with a fixed SC model including stretch reflexes to reproduce a target trajectory in various gravity conditions. Inversely, we fixed the supraspinal commands and optimised the spinal synaptic strengths in the different environments. In the first optimisation context, the presence of SC resulted in easier optimisation of the supraspinal commands (faster convergence, better performance). The main supraspinal commands modulation was found in the flexor sinusoid's amplitude, resp. frequency, to adapt to different gravity magnitudes, resp. directions. In the second optimisation context, the modulation of the spinal synaptic strengths also remarkably reproduced the target trajectory for the mild gravity changes. We highlighted that both strategies of modulation of the supraspinal commands or spinal stretch pathways can be used to control movements in different gravity environments. Our results thus support that the SC can assist gravity compensation.
人类能够在各种物理环境和姿势下(对应于不同的重力体验)进行运动,这需要肌肉骨骼系统、神经系统与外部环境的相互作用。神经系统本身由几个相互作用的部分组成,从主要进行运动规划的大脑,到通过感觉反射实现自身运动控制中心的脊髓(SC)。然而,尚不清楚在各种环境动力学中类似的运动是否需要在大脑层面进行适应性调节、在脊髓层面进行校正性调节,或者两者都需要。在这里,我们通过关注各种重力条件(大小和方向)下的上肢运动控制并使用神经肌肉骨骼模拟工具来解决这个问题。我们将脊髓上的正弦指令与控制肌肉骨骼模型的模块化脊髓模型相结合,以在不同情境下重现各种记录的手臂轨迹(运动学和肌电图)。我们首先研究了各种脊髓通路(如牵张反射)在运动平滑性和抗干扰鲁棒性中的作用。然后,我们在有无包含牵张反射的固定脊髓模型的情况下优化脊髓上的正弦指令,以在各种重力条件下重现目标轨迹。相反,我们固定脊髓上的指令并在不同环境中优化脊髓突触强度。在第一种优化情境中,脊髓的存在使得脊髓上的指令更容易优化(更快收敛,更好的性能)。发现脊髓上的主要指令调制分别在于屈肌正弦波的幅度和频率,以适应不同的重力大小和方向。在第二种优化情境中,脊髓突触强度的调制也能显著地重现轻度重力变化时的目标轨迹。我们强调,脊髓上的指令调制或脊髓牵张通路的调制策略都可用于控制不同重力环境下的运动。因此,我们的结果支持脊髓可以辅助重力补偿。