Qi Ronghuai, Malhotra Nidhi, Brumfiel Timothy A, Hoang Kimberly, Desai Jaydev P
Department of Mechanical Engineering, University of Nevada, Las Vegas (UNLV), Las Vegas, NV 89154 USA.
Medical Robotics and Automation (RoboMed) Laboratory, Wallace H. Coulter Department of Biomedical Engineering, Georgia Institute of Technology, Atlanta, GA 30332 USA.
Npj Robot. 2025;3(1):1. doi: 10.1038/s44182-024-00017-w. Epub 2025 Jan 8.
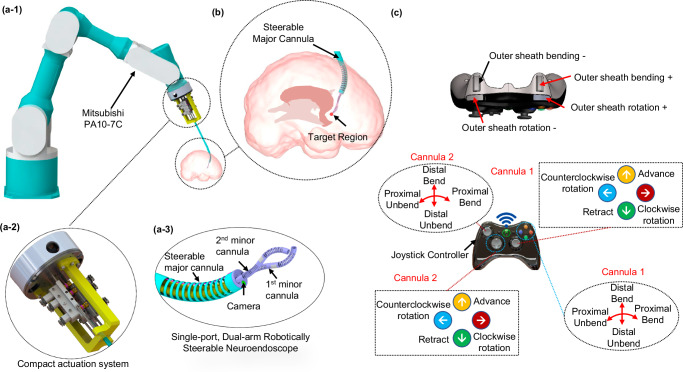
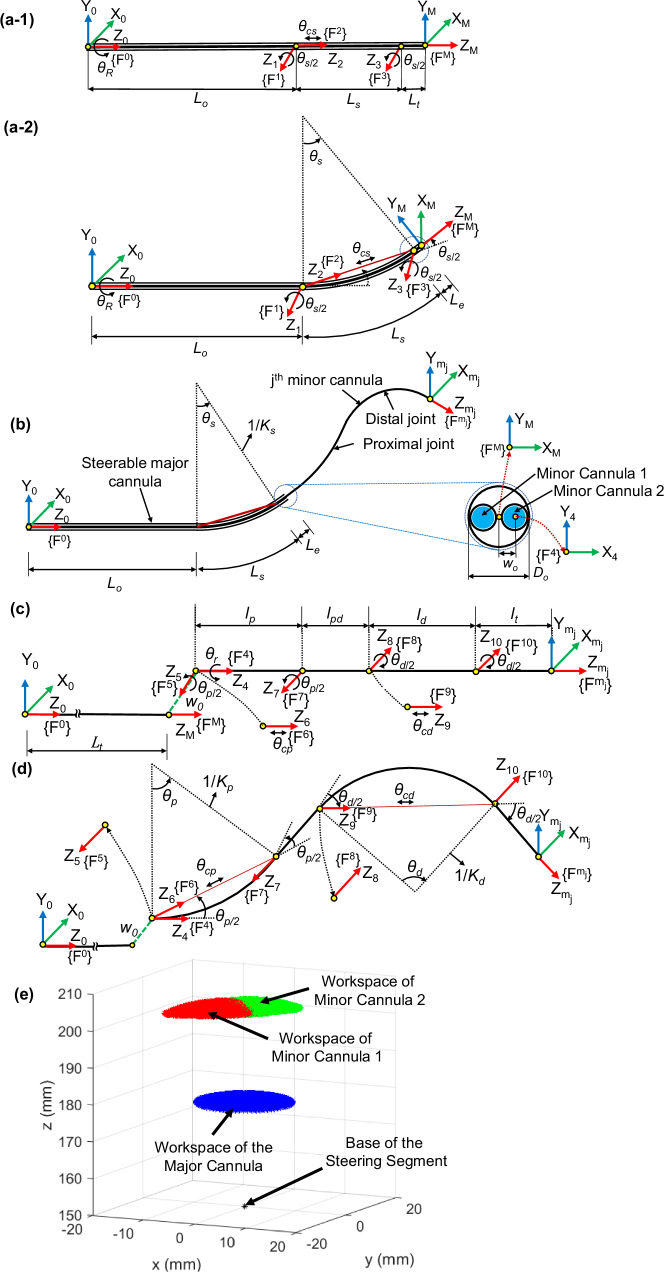
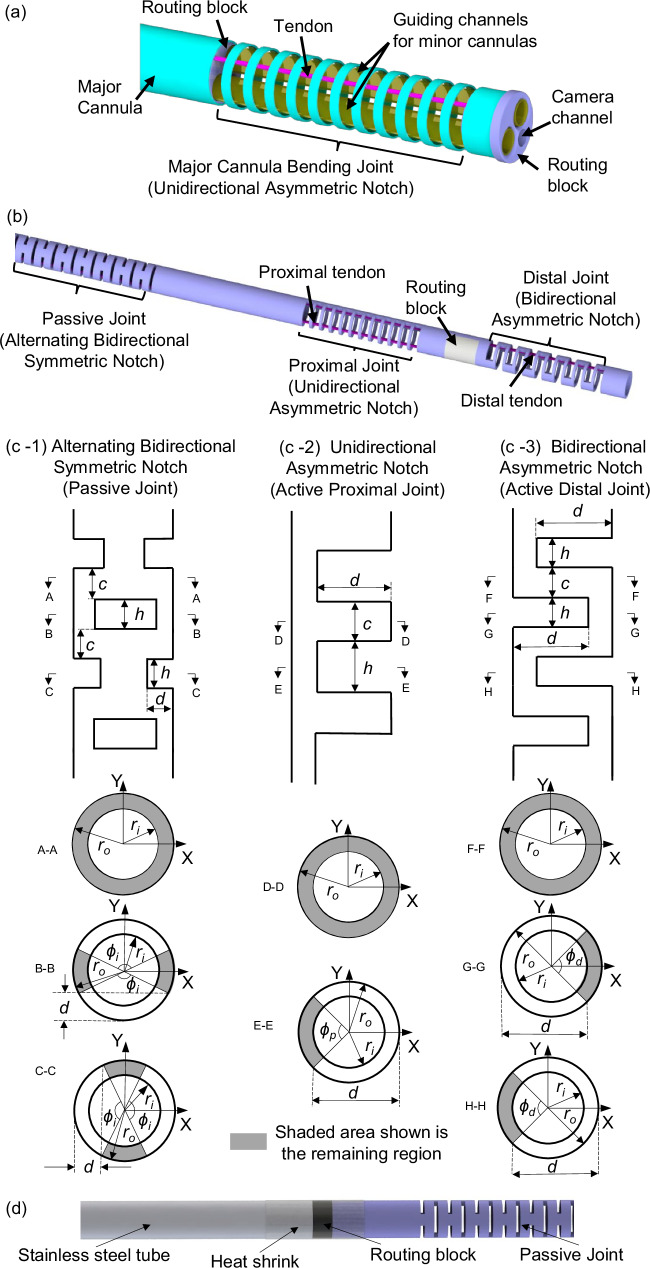
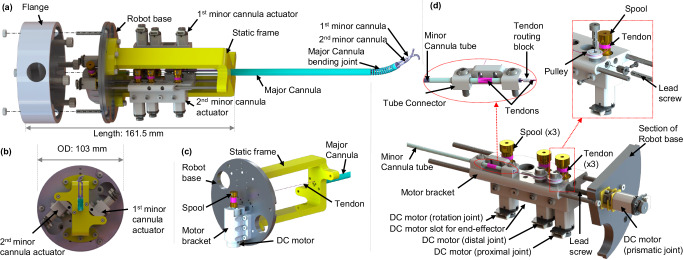
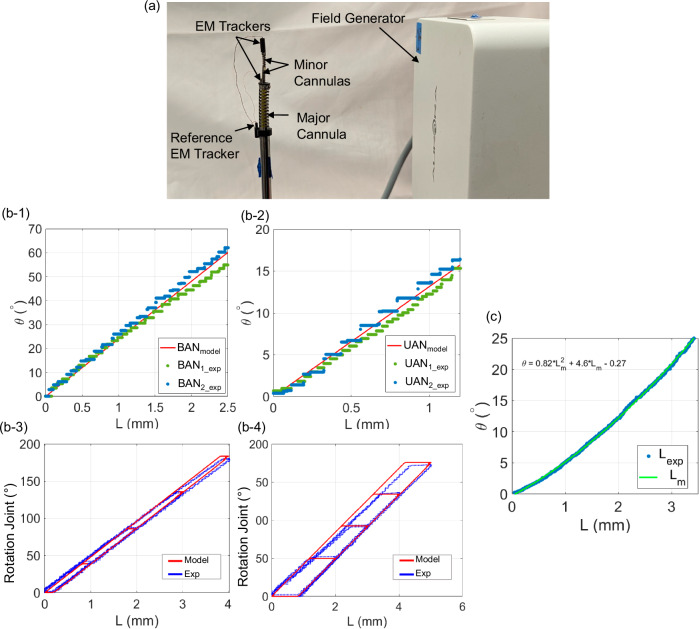
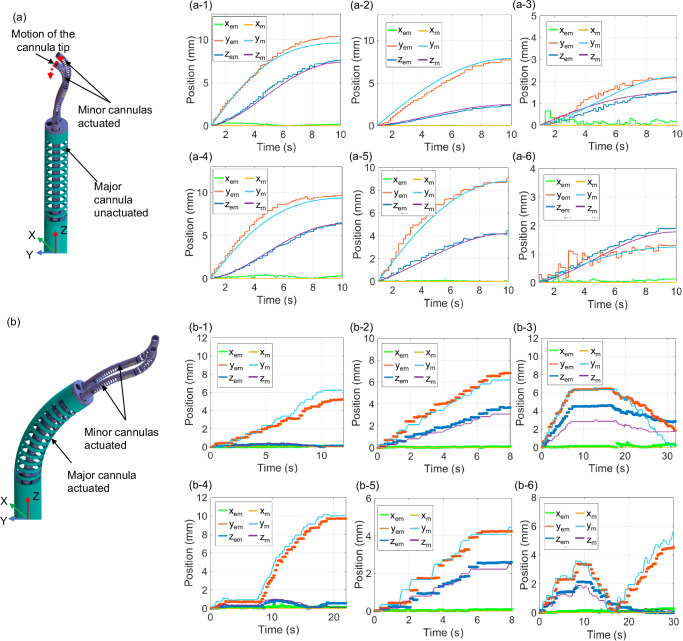
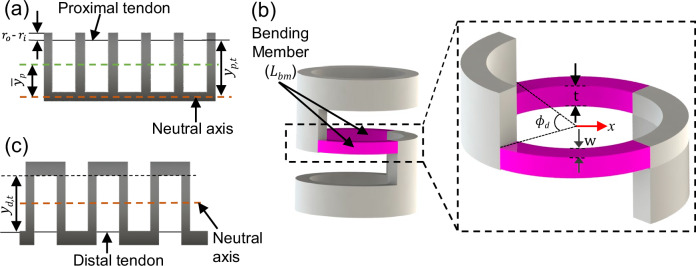
Single-port surgical robots have gained popularity due to less patient trauma and quicker post-surgery recovery. However, due to limited access provided by a single incision, the miniaturization and maneuverability of these robots still needs to be improved. In this paper, we propose the design of a single-port, dual-arm robotically steerable endoscope containing one steerable major cannula and two steerable minor cannulas. By integrating the proposed nine degrees-of-freedom (DoFs) robotically steerable endoscope with an industrial robotic arm and a joystick controller, this robotic system can potentially achieve intuitive, and remote multi-arm manipulation capability. We present the design of the robotically steerable endoscope consisting of tendon-driven joints controlled by a compact actuation system and derive the kinematic and static models. We validate the derived models using different kinematic trajectories with an average RMSE value of 0.98 mm and 0.66 mm for the distal tip position errors of the two steerable minor cannulas.
单端口手术机器人因其对患者创伤小、术后恢复快而受到欢迎。然而,由于单一切口提供的操作空间有限,这些机器人的小型化和可操作性仍有待提高。在本文中,我们提出了一种单端口双臂机器人可操纵内窥镜的设计,该内窥镜包含一个可操纵的主套管和两个可操纵的次套管。通过将所提出的九自由度(DoF)机器人可操纵内窥镜与工业机器人手臂和操纵杆控制器集成,该机器人系统有可能实现直观的远程多臂操作能力。我们介绍了由紧凑驱动系统控制的腱驱动关节组成的机器人可操纵内窥镜的设计,并推导了运动学和静态模型。我们使用不同的运动轨迹对推导模型进行了验证,两个可操纵次套管远端尖端位置误差的平均均方根误差(RMSE)值分别为0.98毫米和0.66毫米。