Department of Surgery, Hamad Medical Corporation, Doha, Qatar.
Department of Electrical and Computer Engineering, University of Houston, Houston, USA.
Surg Endosc. 2023 Jun;37(6):4193-4223. doi: 10.1007/s00464-023-09981-0. Epub 2023 Mar 27.
A variety of human computer interfaces are used by robotic surgical systems to control and actuate camera scopes during minimally invasive surgery. The purpose of this review is to examine the different user interfaces used in both commercial systems and research prototypes.
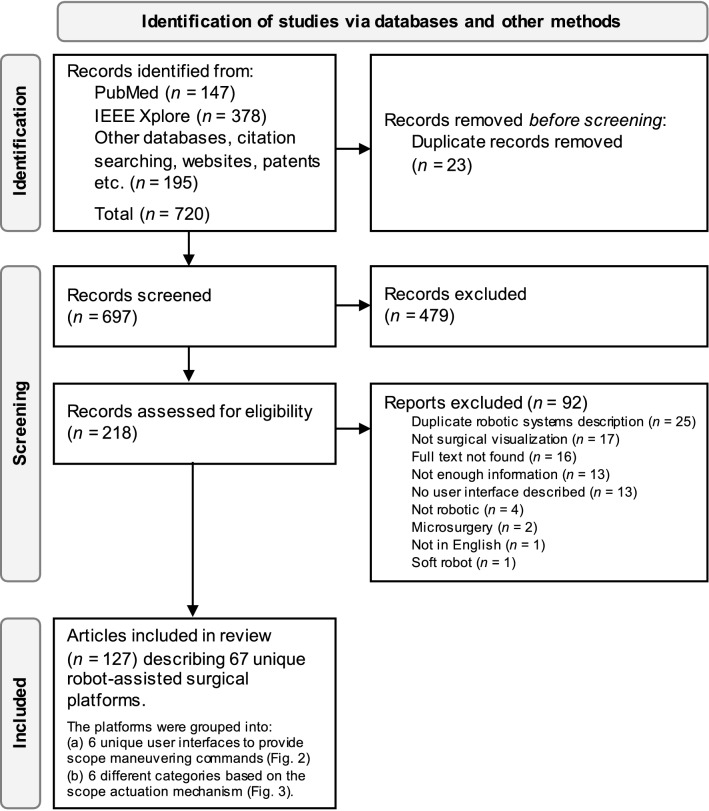
A comprehensive scoping review of scientific literature was conducted using PubMed and IEEE Xplore databases to identify user interfaces used in commercial products and research prototypes of robotic surgical systems and robotic scope holders. Papers related to actuated scopes with human-computer interfaces were included. Several aspects of user interfaces for scope manipulation in commercial and research systems were reviewed.
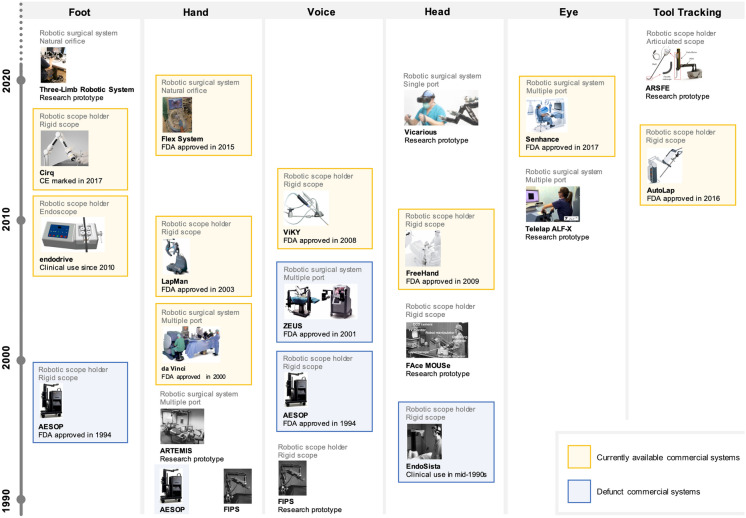
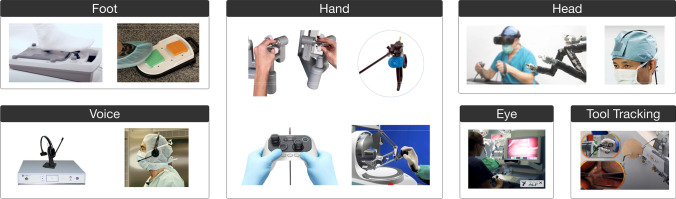
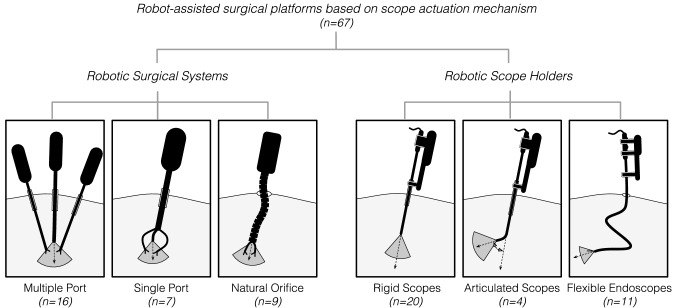
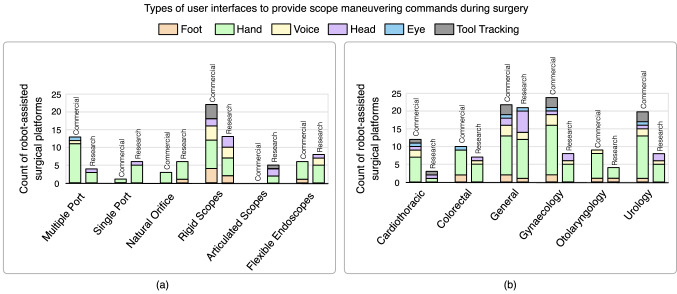
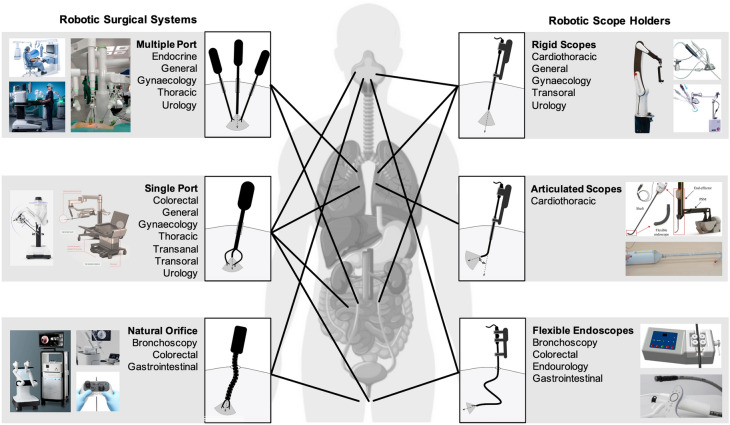
Scope assistance was classified into robotic surgical systems (for multiple port, single port, and natural orifice) and robotic scope holders (for rigid, articulated, and flexible endoscopes). Benefits and drawbacks of control by different user interfaces such as foot, hand, voice, head, eye, and tool tracking were outlined. In the review, it was observed that hand control, with its familiarity and intuitiveness, is the most used interface in commercially available systems. Control by foot, head tracking, and tool tracking are increasingly used to address limitations, such as interruptions to surgical workflow, caused by using a hand interface.
Integrating a combination of different user interfaces for scope manipulation may provide maximum benefit for the surgeons. However, smooth transition between interfaces might pose a challenge while combining controls.
在微创手术中,机器人手术系统使用各种人机接口来控制和驱动摄像镜头。本研究旨在检查商业系统和研究原型中使用的不同用户界面。
使用 PubMed 和 IEEE Xplore 数据库对科学文献进行全面的范围审查,以确定商业产品和机器人手术系统及机器人镜架研究原型中使用的用户界面。纳入了与人机界面相关的主动镜研究论文。综述了商业和研究系统中镜架操纵用户界面的几个方面。
将镜架辅助分为多端口、单端口和自然腔道机器人手术系统和刚性、铰接和柔性内窥镜机器人镜架。概述了不同用户界面(如脚、手、语音、头、眼和工具跟踪)的控制优缺点。在综述中观察到,手控因其熟悉和直观性,是商业上可用系统中最常用的接口。脚控、头跟踪和工具跟踪的控制越来越多地用于解决因使用手控接口而导致的手术流程中断等局限性问题。
结合不同的镜架操纵用户界面可能为外科医生提供最大的收益。然而,在结合控制时,界面之间的平稳过渡可能会带来挑战。