Li Zhaoxin, Weng Ding, Chen Lei, Ma Yuan, Wang Zili, Wang Jiadao
State Key Laboratory of Tribology in Advanced Equipment, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China.
Cyborg Bionic Syst. 2025 Feb 26;6:0215. doi: 10.34133/cbsystems.0215. eCollection 2025.
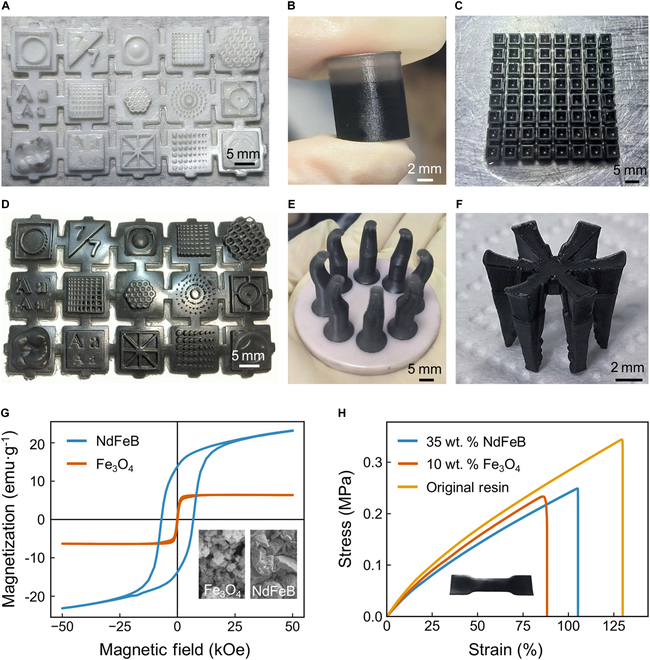
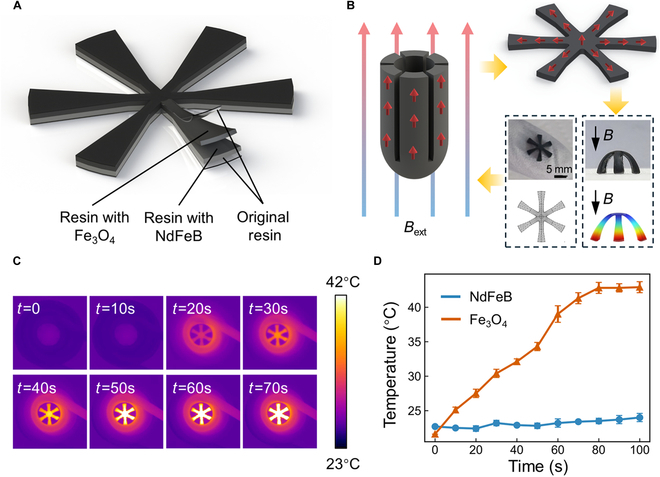
Soft structures driven by magnetic fields exhibit the characteristics of being unencumbered and rapidly responsive, enabling the fabrication of various soft robots according to specific requirements. However, soft structures made from a single magnetic material cannot meet the multifunctional demands of practical scenarios, necessitating the development of soft robot fabrication technologies with composite structures of diverse materials. A novel enhanced digital light processing (DLP) 3-dimensional (3D) printing technology has been developed, capable of printing composite magnetic structures with different materials in a single step. Furthermore, a soft robot with a hard magnetic material-superparamagnetic material composite was designed and printed, demonstrating its thermal effect under high-frequency magnetic fields and the editability of the magnetic domains of the hard magnetic material. The robot exhibits a range of locomotive behaviors, including crawling, rolling, and swimming. Under the influence of a 1-Hz actuation magnetic field, the normalized velocities for these modes of motion are recorded as 0.31 body length per second for crawling, 1.88 body length per second for rolling, and 0.14 body length per second for swimming. The robot has demonstrated its capacity to navigate uneven terrain, surmount barriers, and engage in directed locomotion, along with the ability to capture and transport objects. Additionally, it has showcased swimming capabilities within environments characterized by low Reynolds numbers and high fluid viscosities, findings that corroborate simulation analyses. The multimaterial 3D printing technology introduced in this research presents extensive potential for the design and manufacturing of multifunctional soft robots.
由磁场驱动的柔性结构具有不受束缚和快速响应的特点,能够根据特定要求制造各种柔性机器人。然而,由单一磁性材料制成的柔性结构无法满足实际场景的多功能需求,因此需要开发具有多种材料复合结构的柔性机器人制造技术。一种新型的增强型数字光处理(DLP)三维(3D)打印技术已被开发出来,它能够一步打印出具有不同材料的复合磁性结构。此外,还设计并打印了一种具有硬磁材料-超顺磁材料复合材料的柔性机器人,展示了其在高频磁场下的热效应以及硬磁材料磁畴的可编辑性。该机器人展现出一系列运动行为,包括爬行、滚动和游泳。在1赫兹驱动磁场的影响下,这些运动模式的归一化速度记录如下:爬行时为每秒0.31个身体长度,滚动时为每秒1.88个身体长度,游泳时为每秒0.14个身体长度。该机器人已证明其能够在不平坦地形中导航、跨越障碍物并进行定向运动,同时具备捕获和运输物体的能力。此外,它还展示了在低雷诺数和高流体粘度环境中的游泳能力,这些发现证实了模拟分析结果。本研究中引入的多材料3D打印技术在多功能柔性机器人的设计和制造方面具有广泛的潜力。