Thuangtong Rattapon, Anantawilailekha Ornpreeya, Prasertsin Ponchita, Suthakorn Jackrit
Department of Biomedical Engineering, Center for Biomedical and Robotics Technology, Faculty of Engineering, Mahidol University, Salaya, Thailand.
Comput Struct Biotechnol J. 2025 Feb 20;28:80-93. doi: 10.1016/j.csbj.2025.02.009. eCollection 2025.
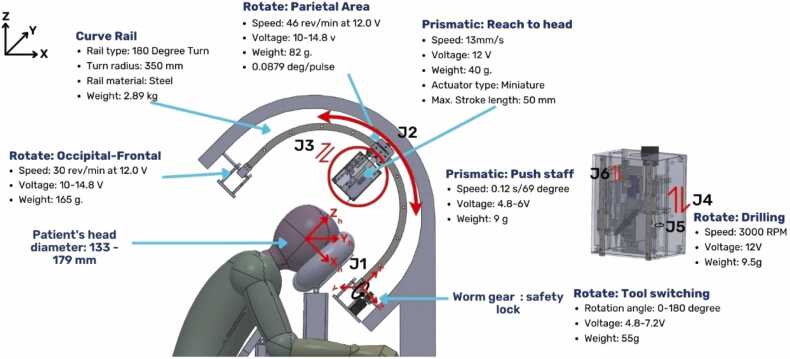
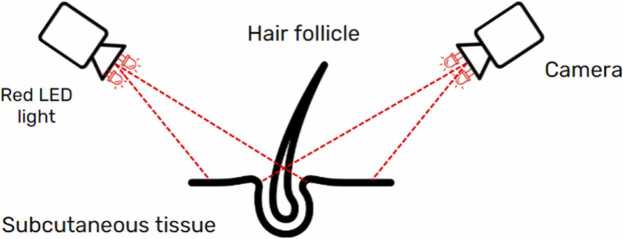
This study presented the development and evaluation of an integrated image-guided robotic system for hair transplant surgery. A novel surgical robot was designed, incorporating an image-guided system, a dual-function needle mechanism, and a comprehensive robotic system capable of performing both follicle harvesting and implantation in a unified setup. The robot comprised three main subsystems: the image-guidance system, the dual-function needle, and the robotic hardware. Each subsystem was meticulously developed and individually described, detailing the specific processes and mechanisms involved. Experimentation involved a silicone phantom embedded with filaments to mimic real human hair density, providing a realistic simulation for testing. The image-guided system demonstrated high precision in detecting the positions of hair follicles, achieving an accuracy rate of 89 %. Meanwhile, the dual-function needle proved effective in executing both the harvesting and implanting functions, achieving harvest and implant success rates of 83.3 % and 53.3 %, respectively. It was important to note, however, that the suction system integrated into the needle mechanism did not function as intended. Further simulations conducted on the robotic system affirmed its suitability for a wide range of head sizes, specifically those with a breadth diameter between 113 and 179 mm, effectively encompassing most of the Asian demographic. This integration of advanced robotics and image-guidance aimed to enhance the efficacy and precision of hair transplant procedures.
本研究介绍了一种用于植发手术的集成图像引导机器人系统的开发与评估。设计了一种新型手术机器人,它集成了图像引导系统、双功能针机构以及一个能够在统一设置下进行毛囊采集和植入的综合机器人系统。该机器人包括三个主要子系统:图像引导系统、双功能针和机器人硬件。每个子系统都经过精心开发并分别进行了描述,详细说明了所涉及的具体过程和机制。实验使用了嵌入细丝以模拟真实人类头发密度的硅胶模型,为测试提供了逼真的模拟。图像引导系统在检测毛囊位置方面显示出高精度,准确率达到89%。同时,双功能针在执行采集和植入功能方面证明是有效的,采集成功率和植入成功率分别达到83.3%和53.3%。然而,需要注意的是,集成在针机构中的抽吸系统未按预期运行。在机器人系统上进行的进一步模拟证实了它适用于各种头围尺寸,特别是那些宽度直径在113至179毫米之间的头围,有效地涵盖了大多数亚洲人群。这种先进机器人技术与图像引导的整合旨在提高植发手术的效果和精度。