Takahashi Masayuki, Hayadate Yuya, Mori Koichi, Hayakawa Akihiro
Department of Aerospace Engineering, Tohoku University, Sendai, 980-8579, Japan.
Department of Aerospace and Marine Engineering, Osaka Metropolitan University, Sakai, 599-8531, Japan.
Sci Rep. 2025 May 3;15(1):15513. doi: 10.1038/s41598-025-00429-0.
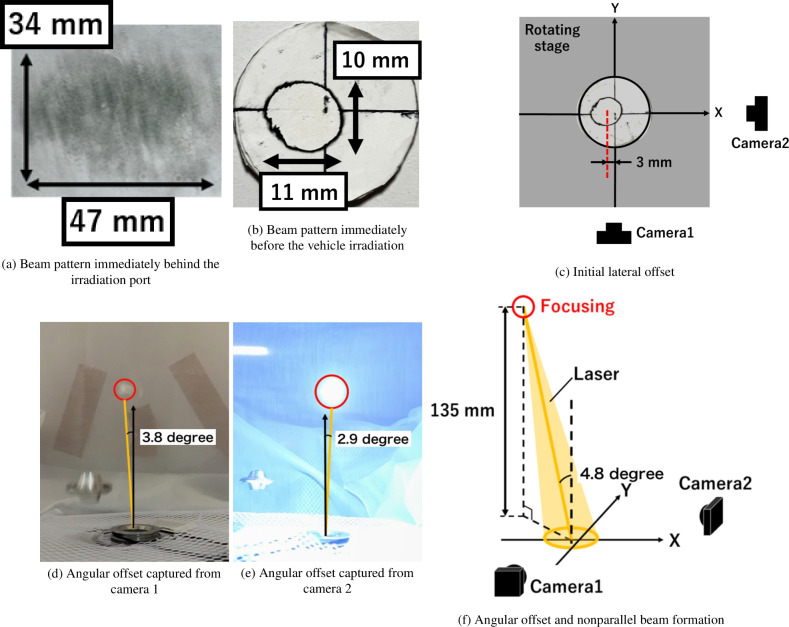
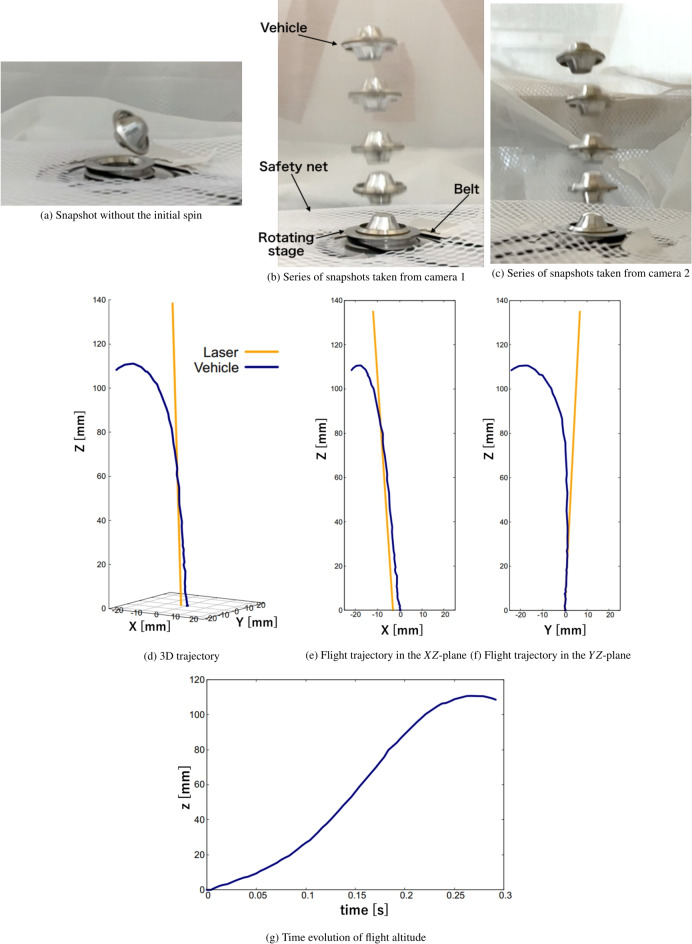
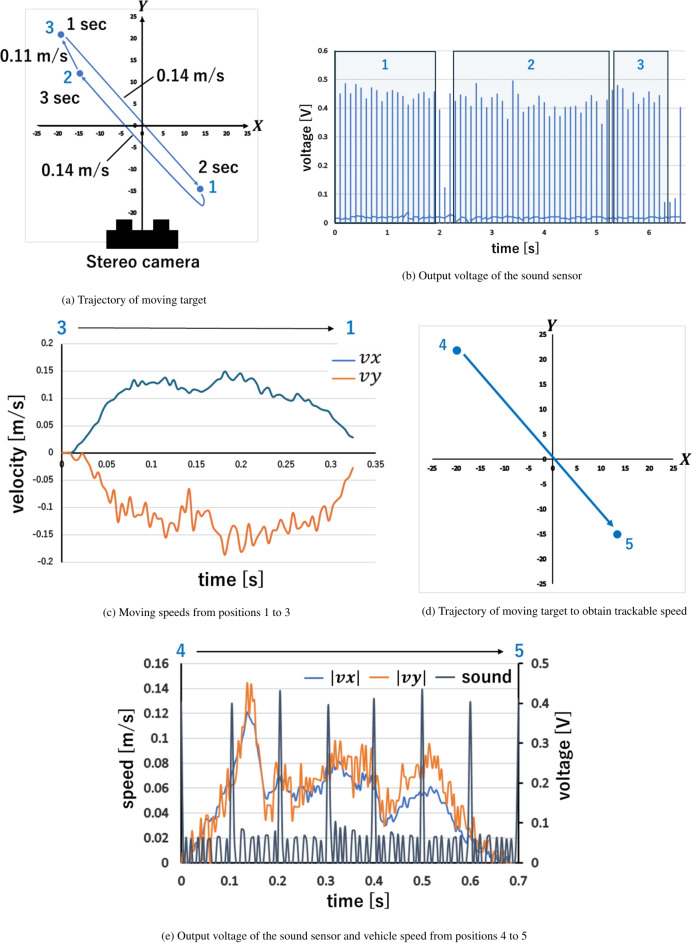
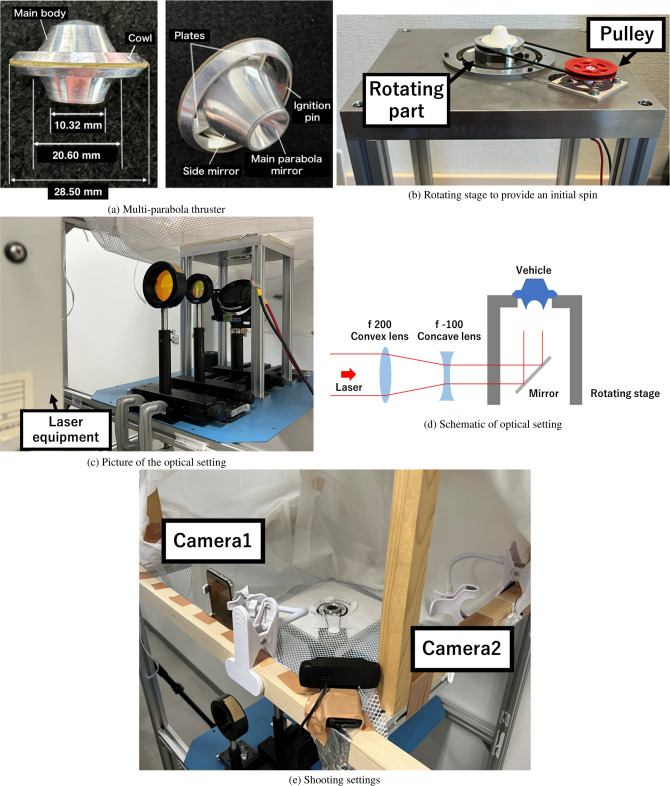
A free-flight experiment involving a multi-parabola laser propulsion vehicle was conducted using repetitive laser pulses at a repetition frequency of 50 Hz and an energy of 4.93 J per pulse. Observations made with a camera indicated that the vehicle achieved a maximum altitude of 110 mm; however, it deviated from the laser beam line due to initial misalignment of the laser setup. To improve flight stability, we developed a tracking system to monitor the vehicle's motion and control the laser irradiation position. Performance requirements were assessed based on the free-flight experiment data, revealing that the vehicle attained a maximum translational speed of 0.08 m/s before deviation occurred. Our tracking system was evaluated to have a trackable speed of 0.09 m/s, meeting the performance requirements for free flight and capable of stabilizing the repetitive pulse flight of a laser propulsion vehicle.
利用重复频率为50Hz、每脉冲能量为4.93J的重复激光脉冲,进行了一项涉及多抛物线激光推进飞行器的自由飞行实验。用相机进行的观测表明,该飞行器达到了110mm的最大高度;然而,由于激光装置的初始对准误差,它偏离了激光束线。为了提高飞行稳定性,我们开发了一个跟踪系统来监测飞行器的运动并控制激光照射位置。基于自由飞行实验数据评估了性能要求,结果表明该飞行器在发生偏差前达到了0.08m/s的最大平移速度。我们的跟踪系统经评估具有0.09m/s的可跟踪速度,满足自由飞行的性能要求,并且能够稳定激光推进飞行器的重复脉冲飞行。