Jiang Yu, Zhao Jiasen, Luo Wei, Guo Bincheng, An Zhulin, Xu Yongjun
Institute of Computing Technology, Chinese Academy of Sciences, Beijing 100190, China.
University of Chinese Academy of Sciences, Beijing 100049, China.
Sensors (Basel). 2025 Jun 23;25(13):3915. doi: 10.3390/s25133915.
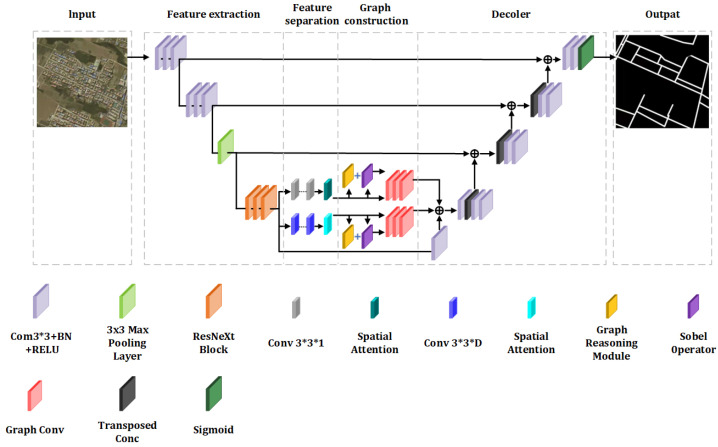
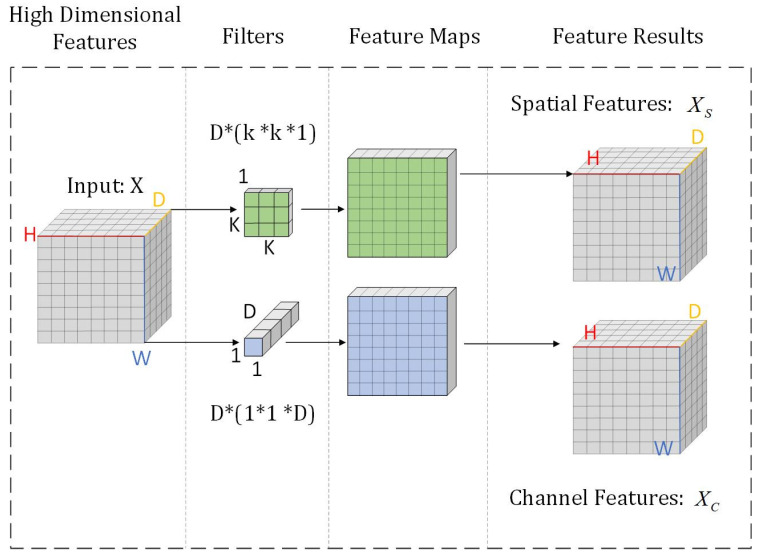
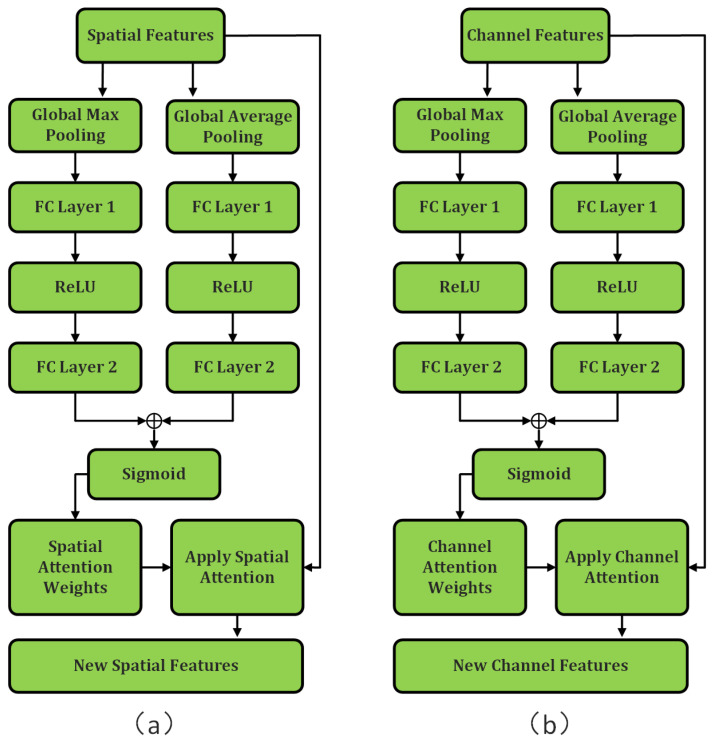
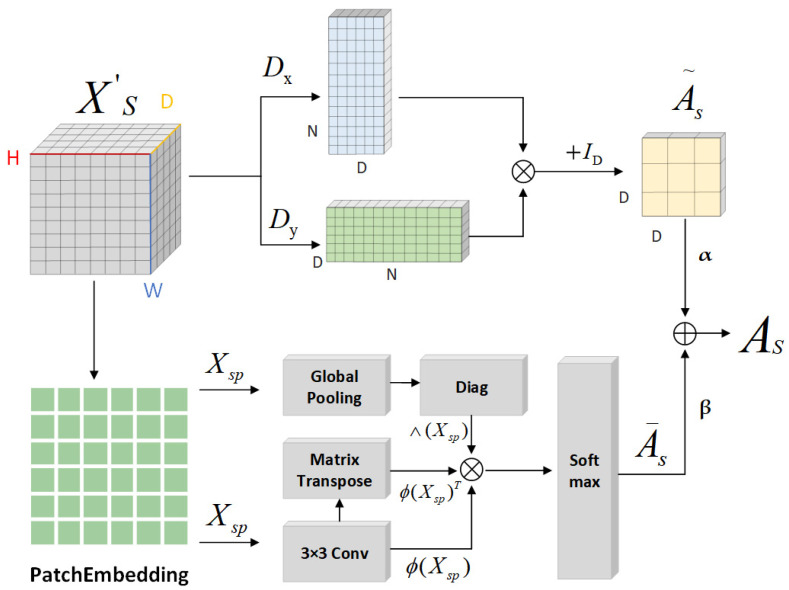
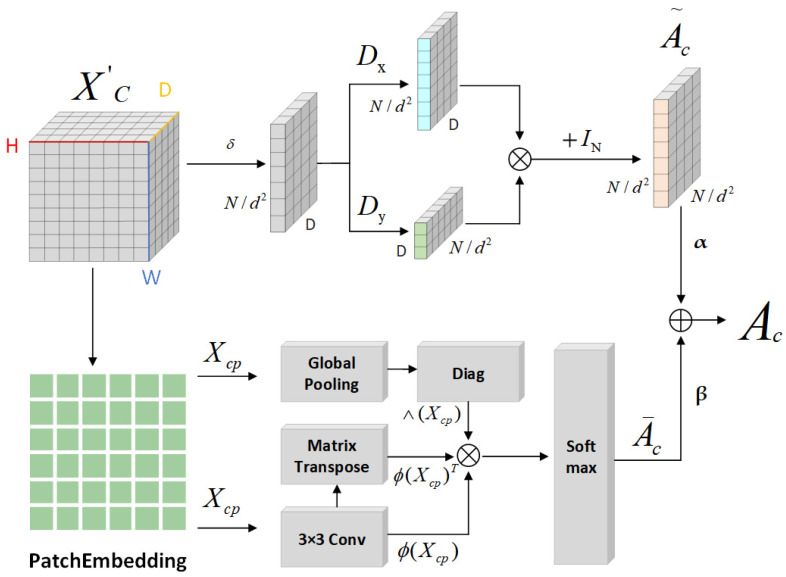
The technology of road extraction serves as a crucial foundation for urban intelligent renewal and green sustainable development. Its outcomes can optimize transportation network planning, reduce resource waste, and enhance urban resilience. Deep learning-based approaches have demonstrated outstanding performance in road extraction, particularly excelling in complex scenarios. However, extracting roads from remote sensing data remains challenging due to several factors that limit accuracy: (1) Roads often share similar visual features with the background, such as rooftops and parking lots, leading to ambiguous inter-class distinctions; (2) Roads in complex environments, such as those occluded by shadows or trees, are difficult to detect. To address these issues, this paper proposes an improved model based on Graph Convolutional Networks (GCNs), named FR-SGCN (Hierarchical Depth-wise Separable Graph Convolutional Network Incorporating Graph Reasoning and Attention Mechanisms). The model is designed to enhance the precision and robustness of road extraction through intelligent techniques, thereby supporting precise planning of green infrastructure. First, high-dimensional features are extracted using ResNeXt, whose grouped convolution structure balances parameter efficiency and feature representation capability, significantly enhancing the expressiveness of the data. These high-dimensional features are then segmented, and enhanced channel and spatial features are obtained via attention mechanisms, effectively mitigating background interference and intra-class ambiguity. Subsequently, a hybrid adjacency matrix construction method is proposed, based on gradient operators and graph reasoning. This method integrates similarity and gradient information and employs graph convolution to capture the global contextual relationships among features. To validate the effectiveness of FR-SGCN, we conducted comparative experiments using 12 different methods on both a self-built dataset and a public dataset. The proposed model achieved the highest F1 score on both datasets. Visualization results from the experiments demonstrate that the model effectively extracts occluded roads and reduces the risk of redundant construction caused by data errors during urban renewal. This provides reliable technical support for smart cities and sustainable development.
道路提取技术是城市智能更新和绿色可持续发展的关键基础。其成果可优化交通网络规划、减少资源浪费并增强城市韧性。基于深度学习的方法在道路提取方面表现出色,尤其在复杂场景中表现卓越。然而,由于多种因素限制了准确性,从遥感数据中提取道路仍然具有挑战性:(1)道路通常与背景(如屋顶和停车场)具有相似的视觉特征,导致类间区分模糊;(2)复杂环境中的道路,如被阴影或树木遮挡的道路,难以检测。为解决这些问题,本文提出了一种基于图卷积网络(GCN)的改进模型,名为FR-SGCN(融合图推理和注意力机制的分层深度可分离图卷积网络)。该模型旨在通过智能技术提高道路提取的精度和鲁棒性,从而支持绿色基础设施的精确规划。首先,使用ResNeXt提取高维特征,其分组卷积结构平衡了参数效率和特征表示能力,显著增强了数据的表现力。然后对这些高维特征进行分割,并通过注意力机制获得增强的通道和空间特征,有效减轻背景干扰和类内模糊性。随后,提出了一种基于梯度算子和图推理的混合邻接矩阵构建方法。该方法整合了相似性和梯度信息,并采用图卷积来捕捉特征之间的全局上下文关系。为验证FR-SGCN的有效性,我们在自建数据集和公共数据集上使用12种不同方法进行了对比实验。所提出的模型在两个数据集上均获得了最高的F1分数。实验的可视化结果表明,该模型有效地提取了被遮挡的道路,并降低了城市更新过程中数据错误导致的冗余建设风险。这为智慧城市和可持续发展提供了可靠的技术支持。