Liao Shengkun, Zhang Lei, He Yunli, Zhang Junhui, Sun Jinxu
Automotive and Transportation School, Tianjin University of Technology and Education, Tianjin 300222, China.
Department of Mechanical Engineering, Shandong Huayu University of Technology, Dezhou 253034, China.
Sensors (Basel). 2025 Jul 24;25(15):4577. doi: 10.3390/s25154577.
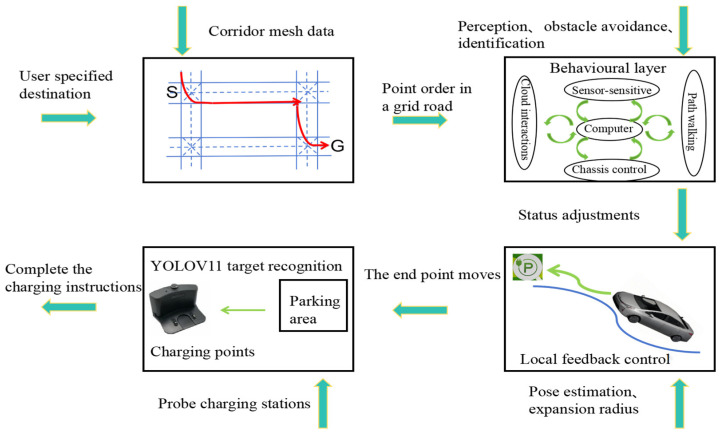
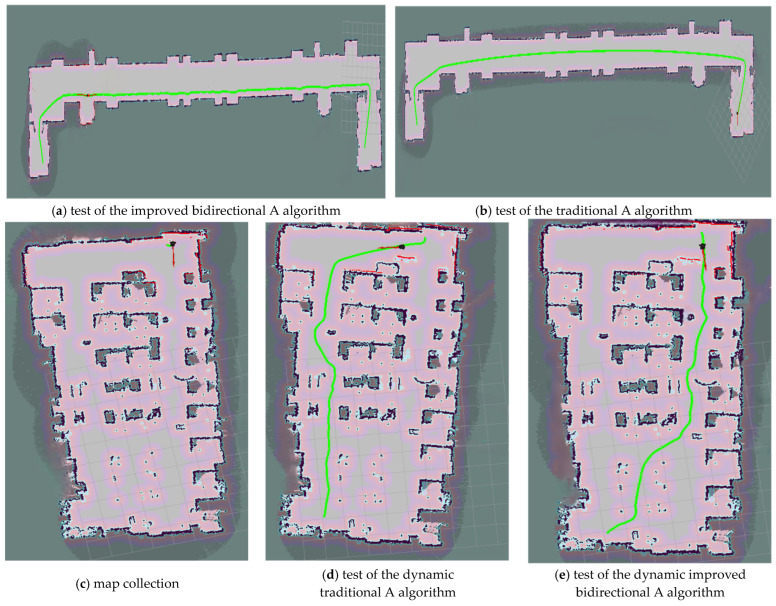
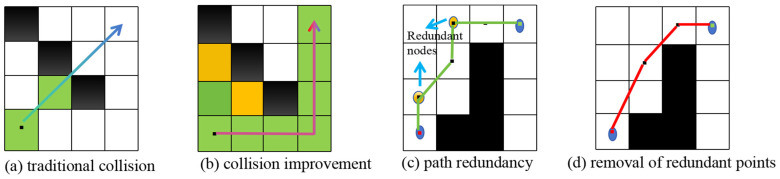
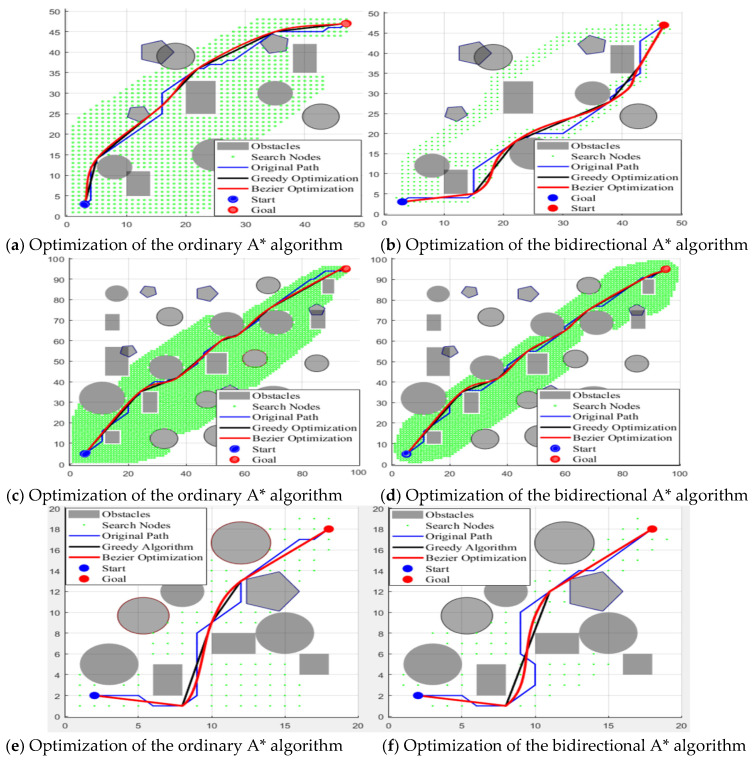
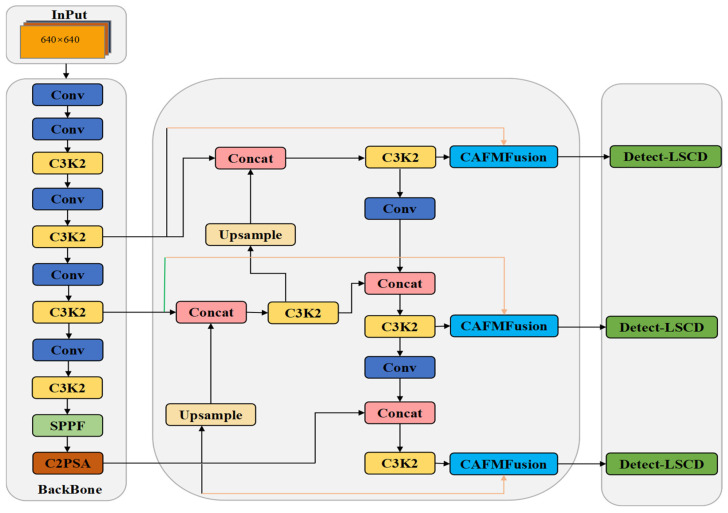
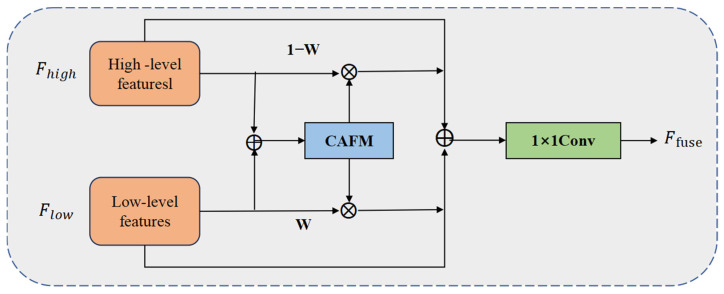
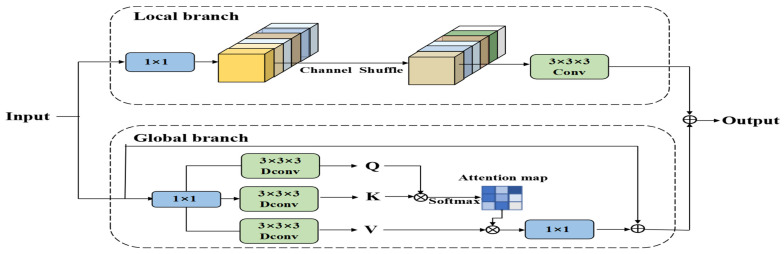
Aiming to enable intelligent vehicles to achieve autonomous charging under low-battery conditions, this paper presents a navigation system for autonomous charging that integrates an improved bidirectional A* algorithm for path planning and an optimized YOLOv11n model for visual recognition. The system utilizes the improved bidirectional A* algorithm to generate collision-free paths from the starting point to the charging area, dynamically adjusting the heuristic function by combining node-target distance and search iterations to optimize bidirectional search weights, pruning expanded nodes via a greedy strategy and smoothing paths into cubic Bézier curves for practical vehicle motion. For precise localization of charging areas and piles, the YOLOv11n model is enhanced with a CAFMFusion mechanism to bridge semantic gaps between shallow and deep features, enabling effective local-global feature fusion and improving detection accuracy. Experimental evaluations in long corridors and complex indoor environments showed that the improved bidirectional A* algorithm outperforms the traditional improved A* algorithm in all metrics, particularly in that it reduces computation time significantly while maintaining robustness in symmetric/non-symmetric and dynamic/non-dynamic scenarios. The optimized YOLOv11n model achieves state-of-the-art precision (P) and mAP@0.5 compared to YOLOv5, YOLOv8n, and the baseline model, with a minor 0.9% recall (R) deficit compared to YOLOv5 but more balanced overall performance and superior capability for small-object detection. By fusing the two improved modules, the proposed system successfully realizes autonomous charging navigation, providing an efficient solution for energy management in intelligent vehicles in real-world environments.
为了使智能车辆在低电量条件下实现自主充电,本文提出了一种自主充电导航系统,该系统集成了用于路径规划的改进双向A算法和用于视觉识别的优化YOLOv11n模型。该系统利用改进的双向A算法生成从起点到充电区域的无碰撞路径,通过结合节点到目标的距离和搜索迭代来动态调整启发式函数,以优化双向搜索权重,通过贪婪策略修剪扩展节点,并将路径平滑为三次贝塞尔曲线以适应实际车辆运动。为了精确地定位充电区域和充电桩,YOLOv11n模型通过CAFMFusion机制进行了增强,以弥合浅层和深层特征之间的语义差距,实现有效的局部-全局特征融合并提高检测精度。在长走廊和复杂室内环境中的实验评估表明,改进的双向A算法在所有指标上均优于传统的改进A算法,特别是在显著减少计算时间的同时,在对称/非对称以及动态/非动态场景中保持了鲁棒性。与YOLOv5、YOLOv8n和基线模型相比,优化后的YOLOv11n模型实现了领先的精度(P)和mAP@0.5,与YOLOv5相比召回率(R)略有0.9%的差距,但整体性能更加平衡,对小目标的检测能力更强。通过融合这两个改进模块,所提出的系统成功实现了自主充电导航,为现实环境中智能车辆的能量管理提供了一种有效的解决方案。