Yang Ruifan, Huang Min, Zhao Wenhao, Zhang Zixuan, Sun Yan, Qian Lulu, Wang Zhanchao
Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China.
School of Optoelectronics, University of Chinese Academy of Sciences, Beijing 100094, China.
Sensors (Basel). 2025 Aug 5;25(15):4822. doi: 10.3390/s25154822.
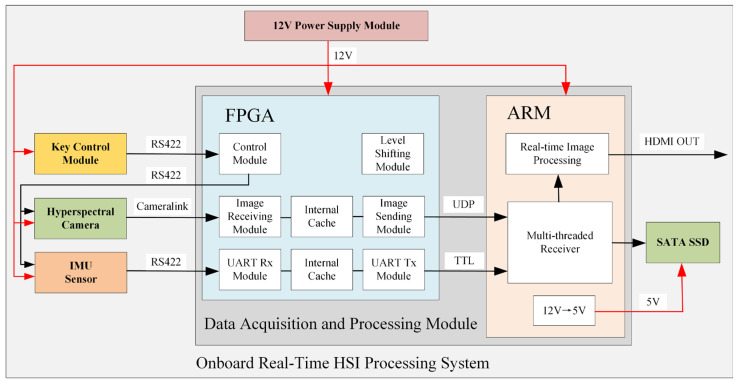
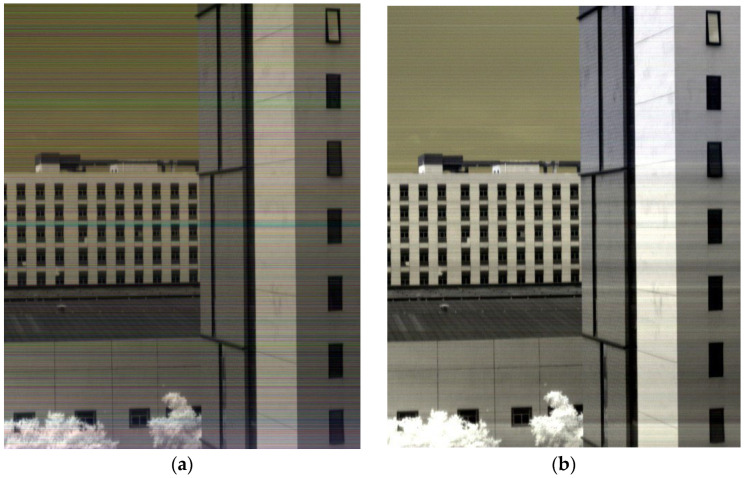
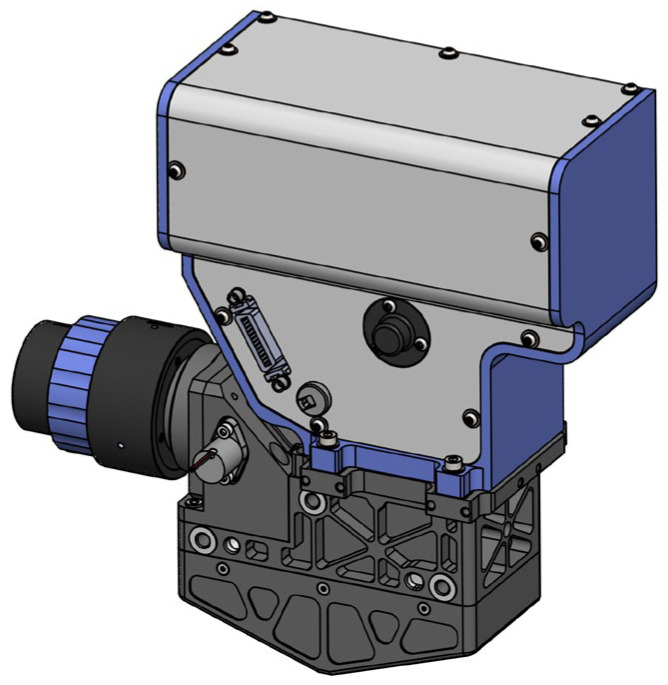
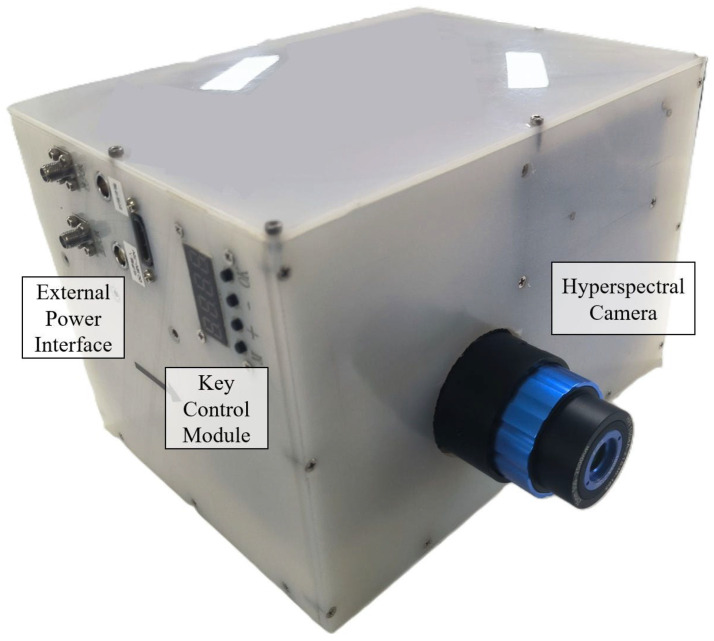
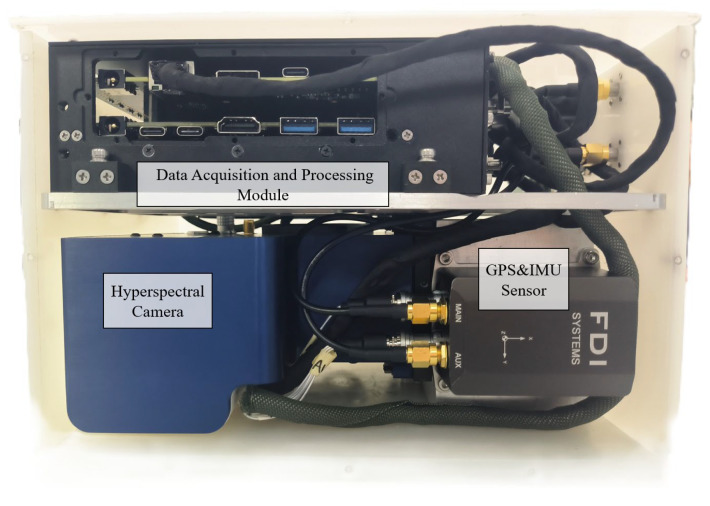
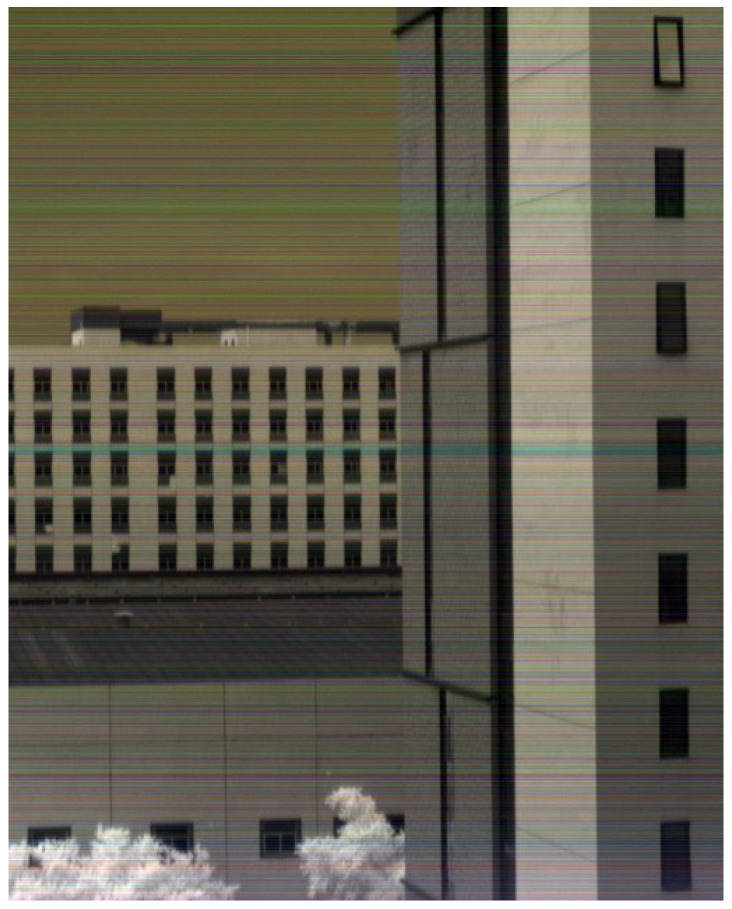
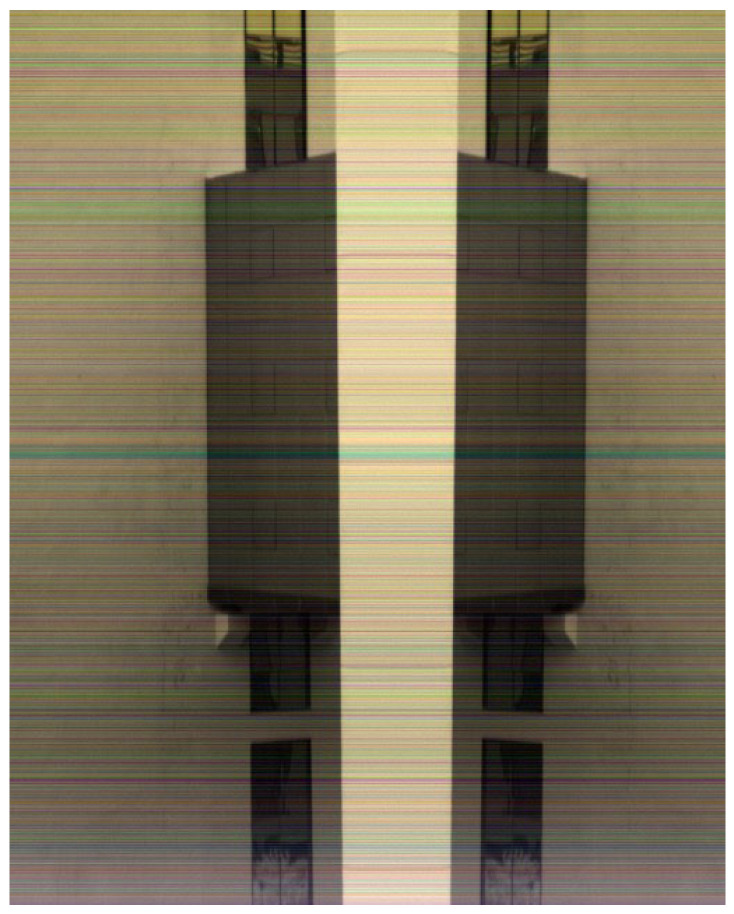
This study proposes and implements a dual-processor FPGA-ARM architecture to resolve the critical contradiction between massive data volumes and real-time processing demands in UAV-borne hyperspectral imaging. The integrated system incorporates a shortwave infrared hyperspectral camera, IMU, control module, heterogeneous computing core, and SATA SSD storage. Through hardware-level task partitioning-utilizing FPGA for high-speed data buffering and ARM for core computational processing-it achieves a real-time end-to-end acquisition-storage-processing-display pipeline. The compact integrated device exhibits a total weight of merely 6 kg and power consumption of 40 W, suitable for airborne platforms. Experimental validation confirms the system's capability to store over 200 frames per second (at 640 × 270 resolution, matching the camera's maximum frame rate), quick-look imaging capability, and demonstrated real-time processing efficacy via relative radio-metric correction tasks (processing 5000 image frames within 1000 ms). This framework provides an effective technical solution to address hyperspectral data processing bottlenecks more efficiently on UAV platforms for dynamic scenario applications. Future work includes actual flight deployment to verify performance in operational environments.
本研究提出并实现了一种双处理器FPGA-ARM架构,以解决无人机载高光谱成像中大量数据量与实时处理需求之间的关键矛盾。该集成系统包括一个短波红外高光谱相机、惯性测量单元(IMU)、控制模块、异构计算核心和SATA固态硬盘存储。通过硬件级任务划分——利用FPGA进行高速数据缓冲,利用ARM进行核心计算处理——它实现了实时端到端采集-存储-处理-显示流水线。这种紧凑的集成设备总重量仅为6千克,功耗为40瓦,适用于机载平台。实验验证证实了该系统每秒存储超过200帧的能力(在640×270分辨率下,与相机的最大帧率匹配)、快速预览成像能力,以及通过相对辐射校正任务(在1000毫秒内处理5000个图像帧)展示的实时处理效率。该框架提供了一种有效的技术解决方案,以便在无人机平台上更高效地解决动态场景应用中的高光谱数据处理瓶颈。未来的工作包括实际飞行部署,以验证其在实际运行环境中的性能。