Alizadehghobadi Shila, Singhal Mukesh, Ehsani Reza
Department of Mechanical Engineering, University of California, Merced, CA 95343, USA.
Department of Electrical Engineering and Computer Science, University of California, Merced, CA 95343, USA.
Sensors (Basel). 2025 Sep 8;25(17):5605. doi: 10.3390/s25175605.
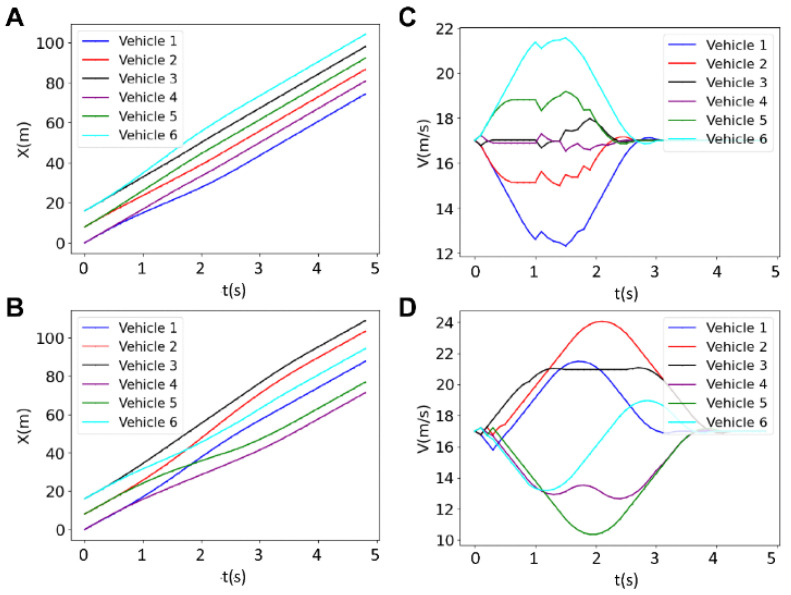
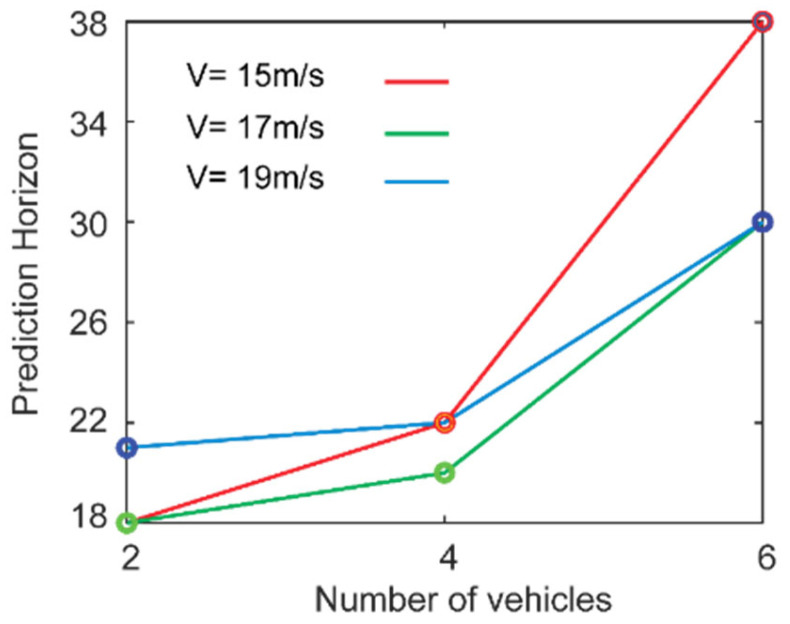
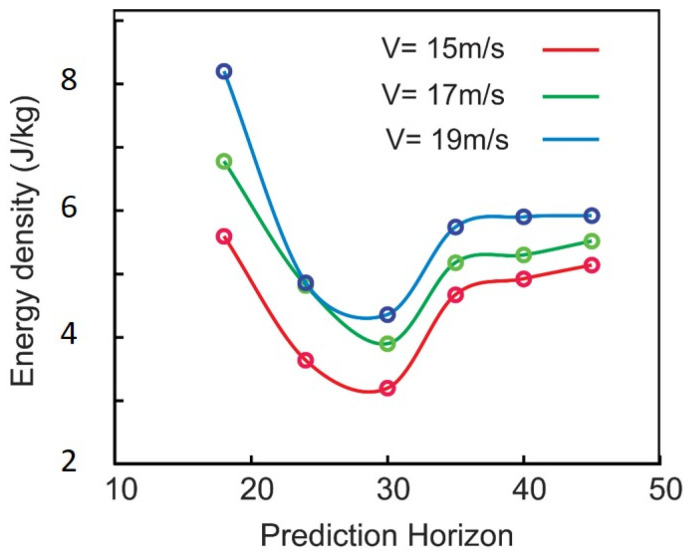
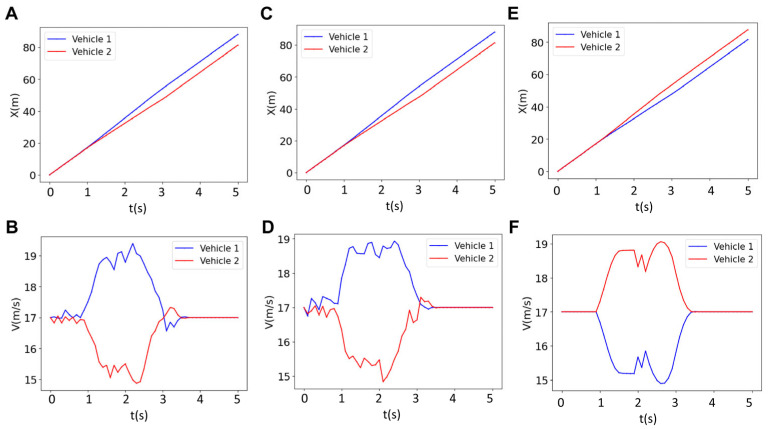
In the context of autonomous vehicles, proper lane merging is critical as it can reduce the traffic bottleneck and lead to safer road transportation. To obtain a collision-free and efficient lane merging, advanced control algorithms need to be designed to smoothly coordinate multiple vehicles to form a platoon. Model predictive control (MPC) is such a controller capable of forecasting future states of multiple vehicles by optimizing their control inputs while satisfying the constraints. Prior MPC-based studies mostly utilized offline planning with a precomputed lookup table of feasible maneuvers to model lane merging. Although these model designs reduce the online computational load, they lack flexibility, as they rely on predefined scenarios and cannot easily adapt to dynamic or unpredictable situations. In this study, we present a centralized MPC framework capable of online trajectory tracking under dynamic constraints and disturbances, for collision-free operation in tightly spaced multi-vehicle platoons. To evaluate the flexibility of our online algorithm, we examine the role of prediction horizon-the time window over which future states are forecasted-and platoon size in determining both the feasibility and efficiency of merging maneuvers. Our results reveal that there exists an optimal prediction horizon at which braking and acceleration can be minimized, thereby reducing energy consumption by 35-40%. Additionally, we observe that increasing the prediction horizon beyond the minimum required for feasibility can alter the vehicle sequence in the platoon. Capturing the changes in vehicle sequence (e.g., who leads or yields) when prediction horizon varies, is a consequence of online trajectory optimization. This vehicle sequence change cannot be captured by offline planning that relies on precomputed look-up table maneuvers. We also found that as the number of vehicles increases, the minimum feasible prediction horizon increases significantly.
在自动驾驶车辆的背景下,正确的车道合并至关重要,因为它可以减少交通瓶颈并带来更安全的道路运输。为了实现无碰撞且高效的车道合并,需要设计先进的控制算法来平稳地协调多辆车以形成一个车队。模型预测控制(MPC)就是这样一种控制器,它能够通过优化控制输入来预测多辆车的未来状态,同时满足各种约束条件。先前基于MPC的研究大多采用离线规划,利用预先计算的可行机动查找表来对车道合并进行建模。虽然这些模型设计减少了在线计算量,但它们缺乏灵活性,因为它们依赖于预定义的场景,并且不容易适应动态或不可预测的情况。在本研究中,我们提出了一种集中式MPC框架,该框架能够在动态约束和干扰下进行在线轨迹跟踪,以在紧密间隔的多车车队中实现无碰撞运行。为了评估我们在线算法的灵活性,我们研究了预测时域(即预测未来状态的时间窗口)和车队规模在确定合并机动的可行性和效率方面所起的作用。我们的结果表明,存在一个最优预测时域,在该时域下制动和加速可以最小化,从而将能耗降低35 - 40%。此外,我们观察到,将预测时域增加到超过可行性所需的最小值会改变车队中的车辆顺序。捕捉预测时域变化时车辆顺序的变化(例如,谁领先或谁让路),是在线轨迹优化的结果。这种车辆顺序的变化无法通过依赖预先计算的查找表机动的离线规划来捕捉。我们还发现,随着车辆数量的增加,最小可行预测时域会显著增加。