McCrea Patrick H, Eng Janice J, Hodgson Antony J
School of Rehabilitation Sciences, University of British Columbia, T325-2211 Wesbrook Mall, Vancouver, BC, V6T 2B5, Canada.
J Neurophysiol. 2005 Nov;94(5):2999-3008. doi: 10.1152/jn.00732.2004. Epub 2005 Jul 13.
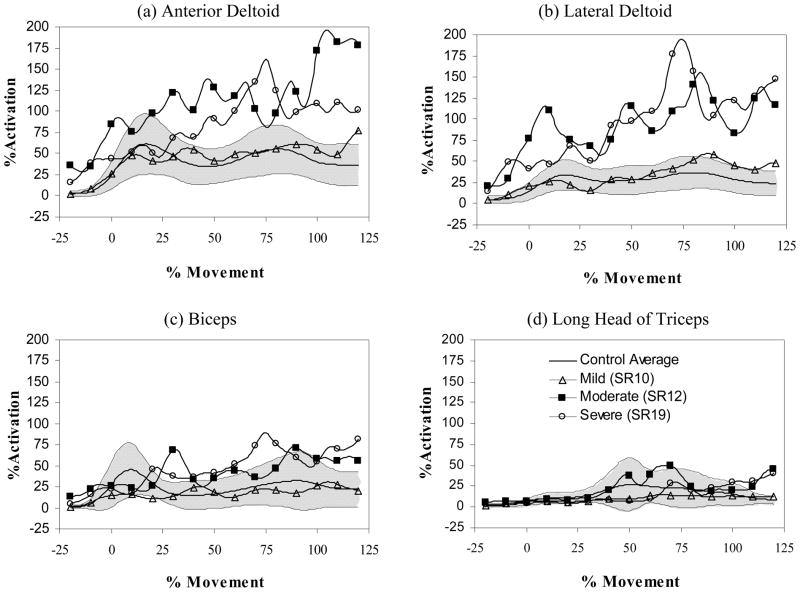
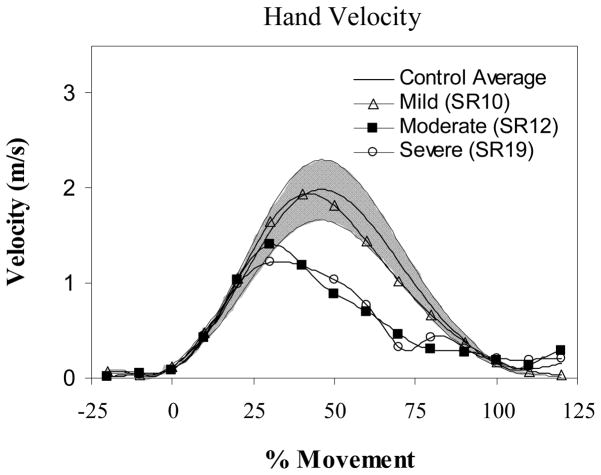
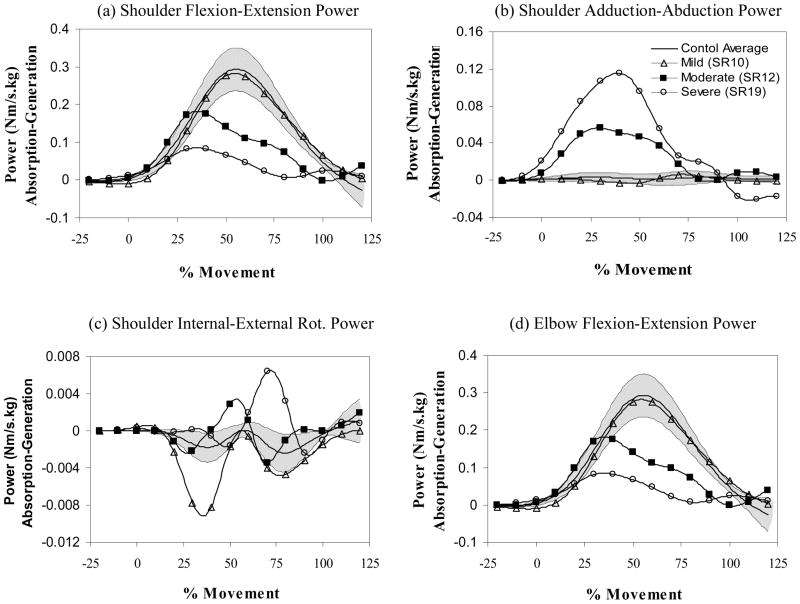
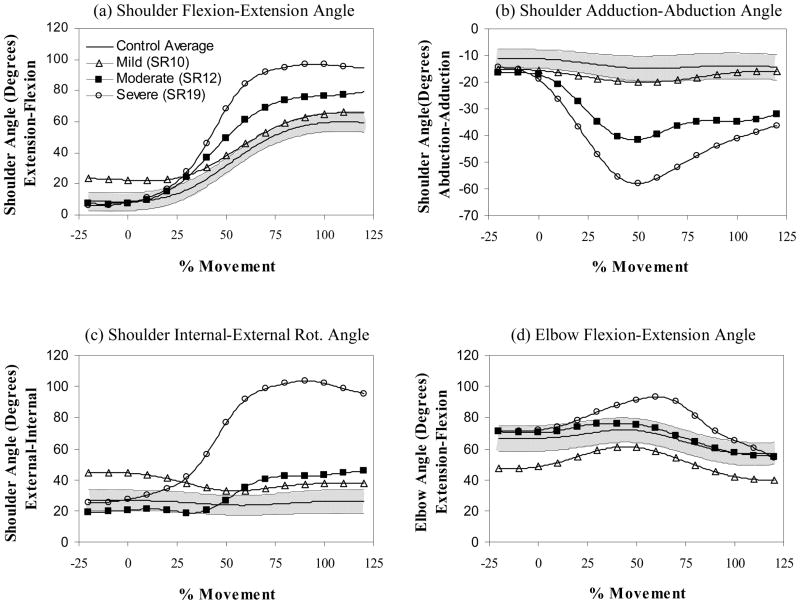
The control and execution of movement could potentially be altered by the presence of stroke-induced weakness if muscles are incapable of generating sufficient power. The purpose of this study was to identify compensatory strategies during a forward (sagittal) reaching task for 20 persons with chronic stroke and 10 healthy age-matched controls. We hypothesized that the paretic anterior deltoid would be maximally activated (i.e., saturated) during a reaching task and that task completion would require activation of additional muscles, resulting in compensatory movements out of the sagittal plane. For reaching movements by control subjects, joint motion remained largely in the sagittal plane and hand trajectories were smooth and direct. Movement characteristics of the nonparetic arm of stroke subjects were similar to control subjects except for small increases in the abduction angle and the percentage that anterior deltoid was activated. In contrast, reaching movements of the paretic arm of stroke subjects were characterized by increased activation of all muscles, especially the lateral deltoid, in addition to the anterior deltoid, with resulting shoulder abduction power and segmented and indirect hand motion. For the paretic arm of stroke subjects, muscle and kinetic compensations increased with impairment severity and weaker muscles were used at a higher percentage of their available muscle activity. These results suggest that the inability to generate sufficient force with the typical agonists involved during a forward reaching task may necessitate compensatory muscle recruitment strategies to complete the task.
如果肌肉无法产生足够的力量,中风引起的肌无力可能会改变运动的控制与执行。本研究旨在确定20名慢性中风患者和10名年龄匹配的健康对照者在向前(矢状面)够物任务中的代偿策略。我们假设,在够物任务中,患侧的前三角肌会被最大程度激活(即达到饱和),且任务的完成需要激活额外的肌肉,从而导致矢状面以外的代偿性运动。对于对照组受试者的够物动作,关节运动主要保持在矢状面内,手部轨迹平滑且直接。中风患者健侧手臂的运动特征与对照组受试者相似,只是外展角度和前三角肌激活百分比略有增加。相比之下,中风患者患侧手臂的够物动作的特点是,除了前三角肌外,所有肌肉(尤其是三角肌外侧)的激活增加,导致肩部外展力量增加,手部运动呈分段且间接。对于中风患者的患侧手臂,肌肉和动力学代偿随着损伤严重程度的增加而增加,较弱的肌肉在其可用肌肉活动中所占比例更高。这些结果表明,在向前够物任务中,典型的主动肌无法产生足够的力量,可能需要代偿性肌肉募集策略来完成任务。