Schmidt Henning, Werner Cordula, Bernhardt Rolf, Hesse Stefan, Krüger Jörg
Department of Automation and Robotics, Fraunhofer IPK, Pascalstrasse 8-9, 10587 Berlin, Germany.
J Neuroeng Rehabil. 2007 Feb 9;4:2. doi: 10.1186/1743-0003-4-2.
Gait restoration is an integral part of rehabilitation of brain lesioned patients. Modern concepts favour a task-specific repetitive approach, i.e. who wants to regain walking has to walk, while tone-inhibiting and gait preparatory manoeuvres had dominated therapy before. Following the first mobilization out of the bed, the wheelchair-bound patient should have the possibility to practise complex gait cycles as soon as possible. Steps in this direction were treadmill training with partial body weight support and most recently gait machines enabling the repetitive training of even surface gait and even of stair climbing.
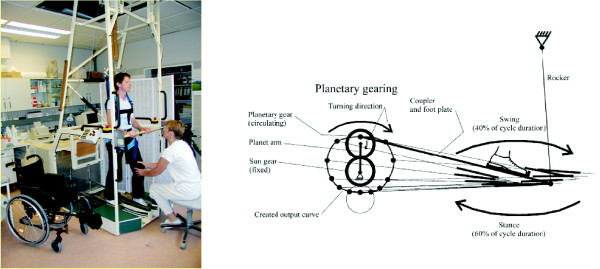
With treadmill training harness-secured and partially relieved wheelchair-mobilised patients could practise up to 1000 steps per session for the first time. Controlled trials in stroke and SCI patients, however, failed to show a superior result when compared to walking exercise on the floor. Most likely explanation was the effort for the therapists, e.g. manually setting the paretic limbs during the swing phase resulting in a too little gait intensity. The next steps were gait machines, either consisting of a powered exoskeleton and a treadmill (Lokomat, AutoAmbulator) or an electromechanical solution with the harness secured patient placed on movable foot plates (Gait Trainer GT I). For the latter, a large multi-centre trial with 155 non-ambulatory stroke patients (DEGAS) revealed a superior gait ability and competence in basic activities of living in the experimental group. The HapticWalker continued the end effector concept of movable foot plates, now fully programmable and equipped with 6 DOF force sensors. This device for the first time enables training of arbitrary walking situations, hence not only the simulation of floor walking but also for example of stair climbing and perturbations.
Locomotor therapy is a fascinating new tool in rehabilitation, which is in line with modern principles of motor relearning promoting a task-specific repetitive approach. Sophisticated technical developments and positive randomized controlled trials form the basis of a growing acceptance worldwide to the benefits or our patients.
步态恢复是脑损伤患者康复的一个重要组成部分。现代理念倾向于采用特定任务的重复训练方法,即想要恢复行走能力的患者必须进行行走训练,而在此之前,抑制肌张力和步态准备动作主导着治疗。首次从床上被扶起后,依赖轮椅的患者应尽快有机会练习复杂的步态周期。朝着这个方向迈出的步伐包括使用部分体重支撑的跑步机训练,以及最近出现的能够对平坦地面步态甚至爬楼梯进行重复训练的步态训练机。
通过跑步机训练,借助安全带固定且部分减轻体重的轮椅使用者患者首次能够每次训练练习多达1000步。然而,在中风和脊髓损伤患者中进行的对照试验表明,与在地面上行走锻炼相比,并未显示出更好的效果。最可能的解释是治疗师付出的努力,例如在摆动期手动摆放瘫痪肢体,导致步态强度过小。接下来出现的是步态训练机,一种由动力外骨骼和跑步机组成(Lokomat,自动步行器),另一种是将借助安全带固定的患者放置在可移动脚板上的机电解决方案(步态训练器GT I)。对于后者,一项针对155名非步行中风患者的大型多中心试验(DEGAS)显示,实验组在基本生活活动中的步态能力和技能更优。触觉步行器延续了可移动脚板的末端执行器概念,现在完全可编程并配备了6自由度力传感器。该设备首次能够对任意行走情况进行训练,因此不仅可以模拟在地面行走,还能模拟例如爬楼梯和应对干扰等情况。
运动疗法是康复领域一项引人入胜的新工具,符合运动再学习的现代原则,促进采用特定任务的重复训练方法。先进的技术发展和积极的随机对照试验构成了全球范围内对其给我们患者带来益处的认可度不断提高的基础。