Berret Bastien, Darlot Christian, Jean Frédéric, Pozzo Thierry, Papaxanthis Charalambos, Gauthier Jean Paul
Université de Bourgogne, INSERM U887 Motricité-Plasticité, Dijon, France.
PLoS Comput Biol. 2008 Oct;4(10):e1000194. doi: 10.1371/journal.pcbi.1000194. Epub 2008 Oct 24.
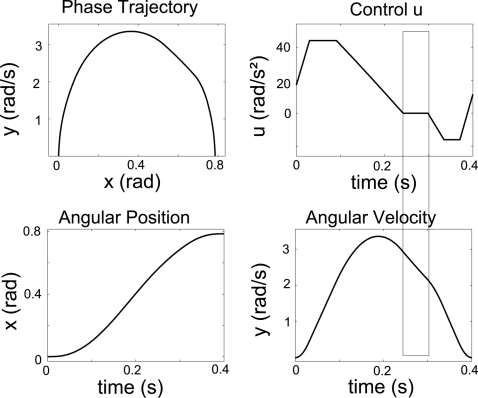
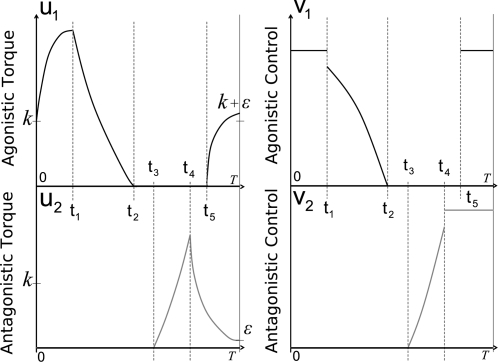
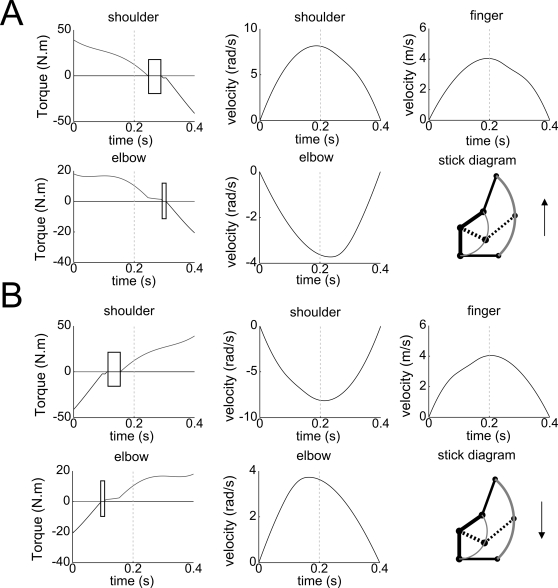
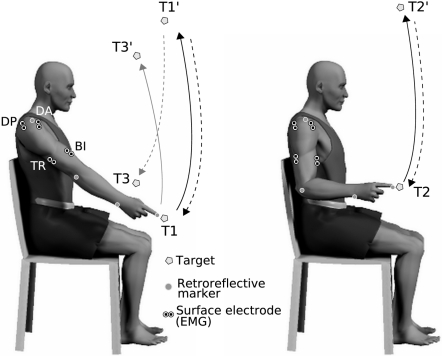
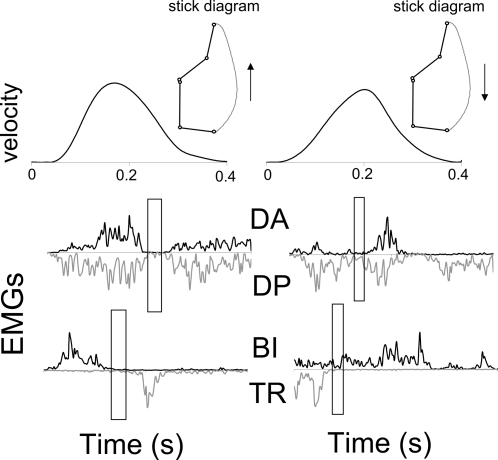
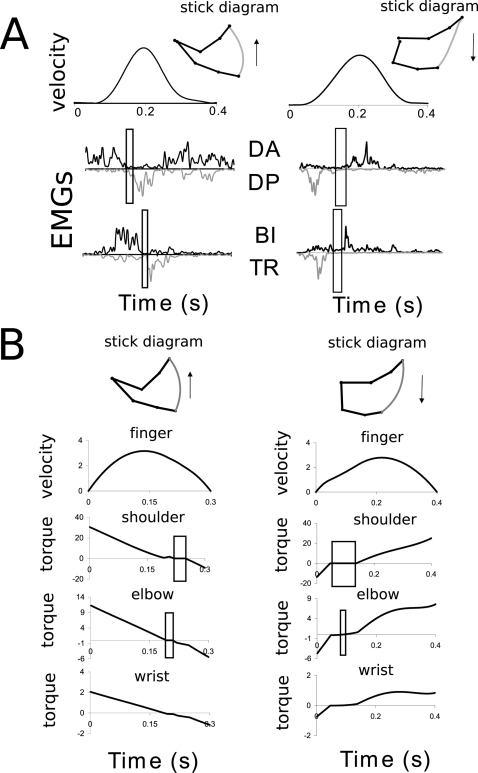
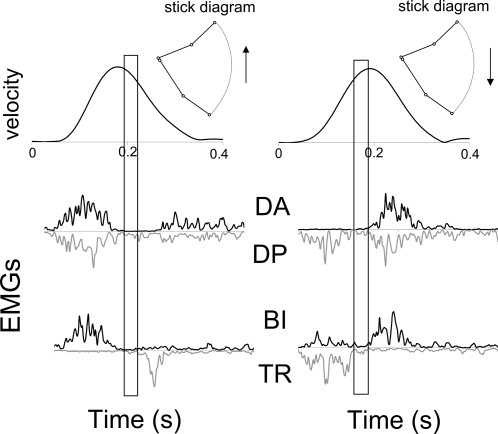
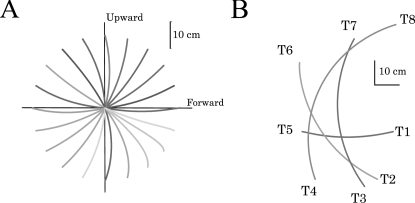
An important question in the literature focusing on motor control is to determine which laws drive biological limb movements. This question has prompted numerous investigations analyzing arm movements in both humans and monkeys. Many theories assume that among all possible movements the one actually performed satisfies an optimality criterion. In the framework of optimal control theory, a first approach is to choose a cost function and test whether the proposed model fits with experimental data. A second approach (generally considered as the more difficult) is to infer the cost function from behavioral data. The cost proposed here includes a term called the absolute work of forces, reflecting the mechanical energy expenditure. Contrary to most investigations studying optimality principles of arm movements, this model has the particularity of using a cost function that is not smooth. First, a mathematical theory related to both direct and inverse optimal control approaches is presented. The first theoretical result is the Inactivation Principle, according to which minimizing a term similar to the absolute work implies simultaneous inactivation of agonistic and antagonistic muscles acting on a single joint, near the time of peak velocity. The second theoretical result is that, conversely, the presence of non-smoothness in the cost function is a necessary condition for the existence of such inactivation. Second, during an experimental study, participants were asked to perform fast vertical arm movements with one, two, and three degrees of freedom. Observed trajectories, velocity profiles, and final postures were accurately simulated by the model. In accordance, electromyographic signals showed brief simultaneous inactivation of opposing muscles during movements. Thus, assuming that human movements are optimal with respect to a certain integral cost, the minimization of an absolute-work-like cost is supported by experimental observations. Such types of optimality criteria may be applied to a large range of biological movements.
专注于运动控制的文献中的一个重要问题是确定哪些规律驱动生物肢体运动。这个问题促使众多研究分析人类和猴子的手臂运动。许多理论假设,在所有可能的运动中,实际执行的运动满足最优性标准。在最优控制理论的框架下,第一种方法是选择一个代价函数,并测试所提出的模型是否与实验数据相符。第二种方法(通常被认为更困难)是从行为数据中推断代价函数。这里提出的代价包括一个称为力的绝对功的项,反映机械能消耗。与大多数研究手臂运动最优性原理的研究不同,该模型的特殊性在于使用了一个不光滑的代价函数。首先,提出了一种与直接和逆最优控制方法相关的数学理论。第一个理论结果是失活原理,根据该原理,最小化一个类似于绝对功的项意味着在峰值速度附近,作用于单个关节的拮抗肌和协同肌同时失活。第二个理论结果是,相反,代价函数中存在非光滑性是这种失活存在的必要条件。其次,在一项实验研究中,要求参与者进行具有一、二和三个自由度的快速垂直手臂运动。模型准确地模拟了观察到的轨迹、速度分布和最终姿势。相应地,肌电图信号显示在运动过程中对抗肌短暂同时失活。因此,假设人类运动相对于某个积分代价是最优的,实验观察结果支持了类似绝对功代价的最小化。这种类型的最优性标准可能适用于广泛的生物运动。