Neural Engineering Center for Artificial Limbs, Rehabilitation Institute of Chicago, Chicago, IL 60611, USA.
IEEE Trans Neural Syst Rehabil Eng. 2010 Apr;18(2):185-92. doi: 10.1109/TNSRE.2009.2039619. Epub 2010 Jan 12.
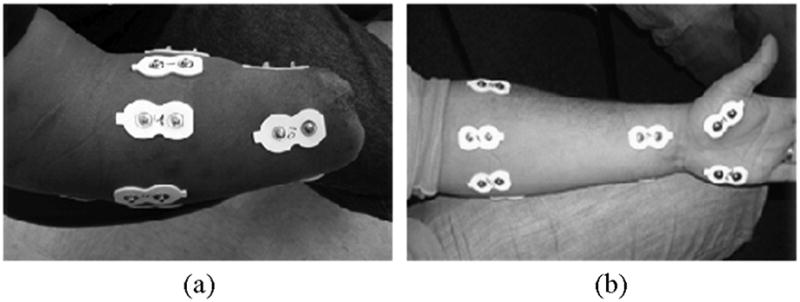
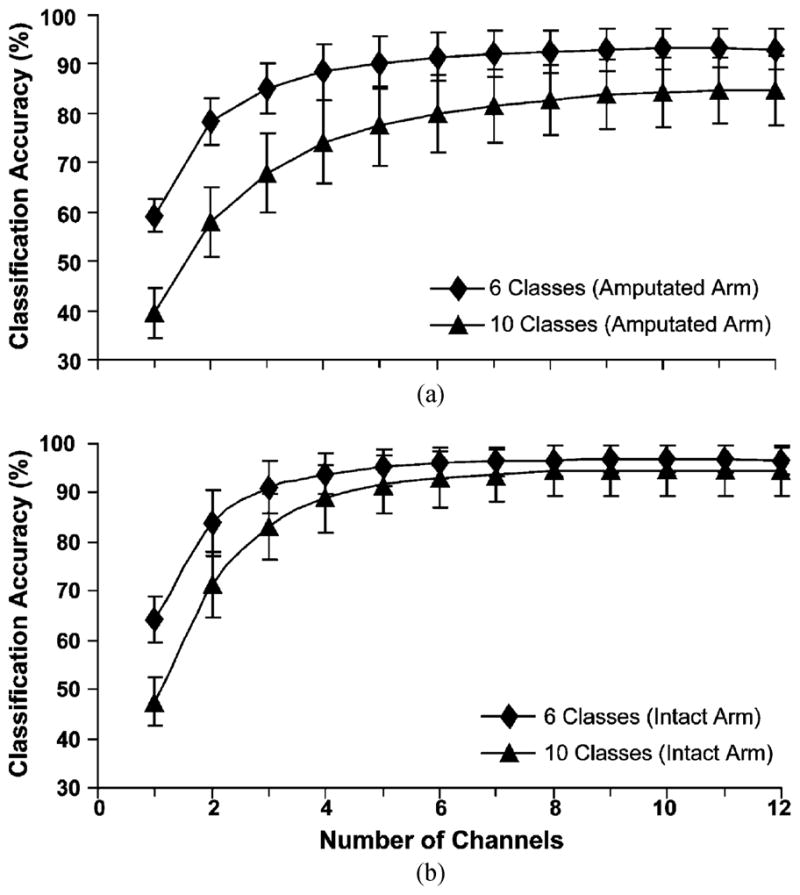
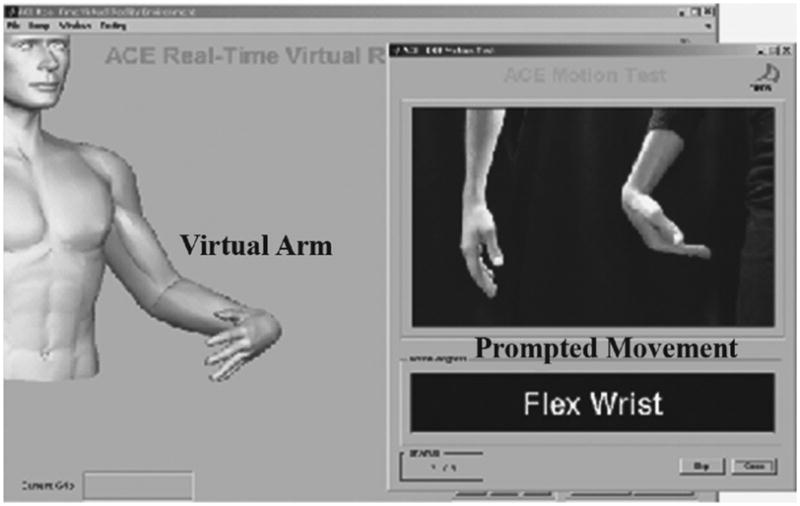
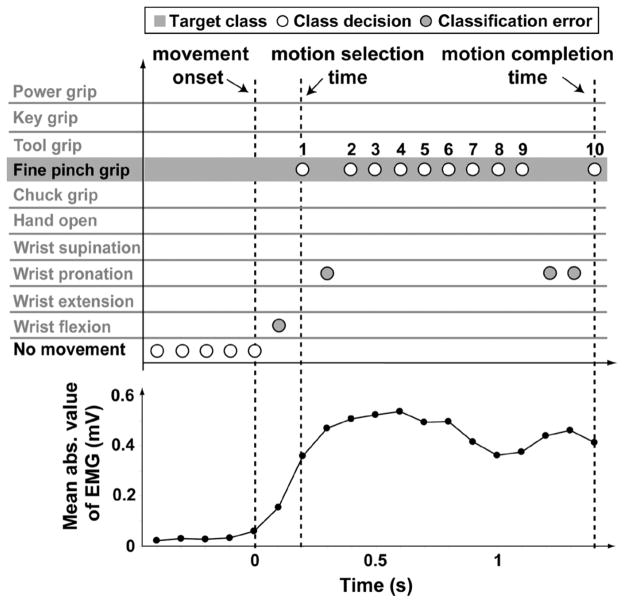
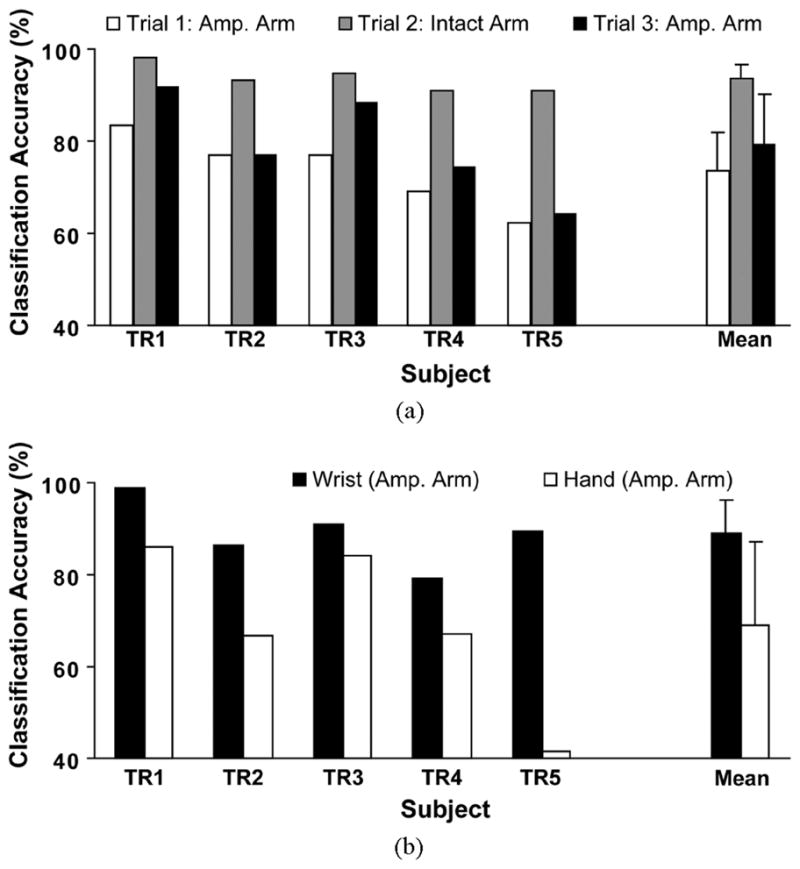
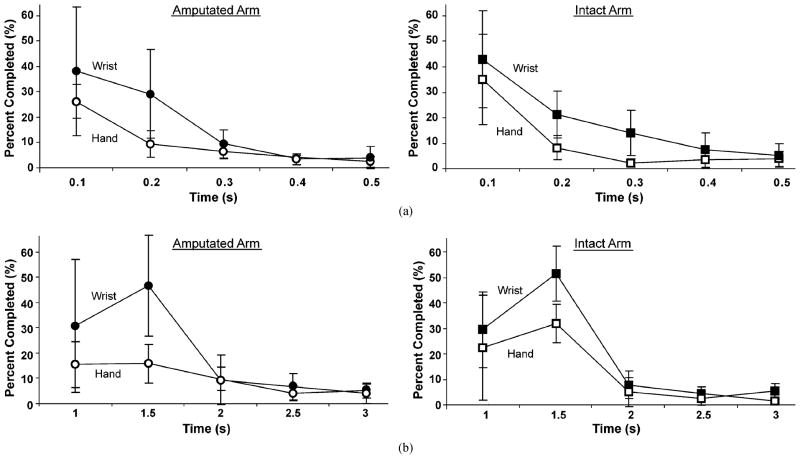
We evaluated real-time myoelectric pattern recognition control of a virtual arm by transradial amputees. Five unilateral patients performed 10 wrist and hand movements using their amputated and intact arms. In order to demonstrate the value of information from intrinsic hand muscles, this data was included in EMG recordings from the intact arm. With both arms, motions were selected in approximately 0.2 s on average, and completed in less than 1.25 s. Approximately 99% of wrist movements were completed using either arm; however, the completion rate of hand movements was significantly lower for the amputated arm (53.9% +/- 14.2%) than for the intact arm ( 69.4% +/- 13.1%). For the amputated arm, average classification accuracy for only 6 movements-including a single hand grasp-was 93.1% +/- 4.1%, compared to 84.4% +/- 7.2% for all 10 movements. Use of 6 optimally-placed electrodes only reduced this accuracy to 91.5% +/- 4.9%. These results suggest that muscles in the residual forearm produce sufficient myoelectric information for real-time wrist control, but not for performing multiple hand grasps. The outcomes of this study could aid the development of a practical multifunctional myoelectric prosthesis for transradial amputees, and suggest that increased EMG information-such as made available through targeted muscle reinnervation-could improve control of these prostheses.
我们评估了经桡骨截肢患者实时肌电模式识别控制虚拟手臂的效果。5 名单侧患者使用他们截肢的和完好的手臂进行了 10 次手腕和手部运动。为了展示来自内在手部肌肉的信息的价值,将此数据包含在完好手臂的肌电图记录中。使用两只手臂,平均每次运动的选择时间约为 0.2 秒,完成时间不到 1.25 秒。大约 99%的手腕运动使用任何一只手臂都可以完成;然而,截肢手臂的运动完成率(53.9% +/- 14.2%)明显低于完好手臂(69.4% +/- 13.1%)。对于截肢手臂,仅包括 6 个运动(包括单手抓握)的平均分类准确率为 93.1% +/- 4.1%,而 10 个运动的平均分类准确率为 84.4% +/- 7.2%。使用仅 6 个最佳位置的电极仅将准确率降低到 91.5% +/- 4.9%。这些结果表明,残留在前臂中的肌肉产生了足够的肌电信息,可用于实时手腕控制,但不足以进行多个手部抓握。这项研究的结果可以帮助开发一种实用的多功能肌电假肢,用于经桡骨截肢患者,并且表明增加肌电信息(如通过靶向肌肉再神经支配提供的信息)可以改善对这些假肢的控制。