Biomedical Engineering Department at Case Western Reserve University and Cleveland Veterans Affairs Medical Center, Cleveland, OH 44109, USA.
IEEE Trans Neural Syst Rehabil Eng. 2010 Dec;18(6):646-57. doi: 10.1109/TNSRE.2010.2083693. Epub 2010 Oct 4.
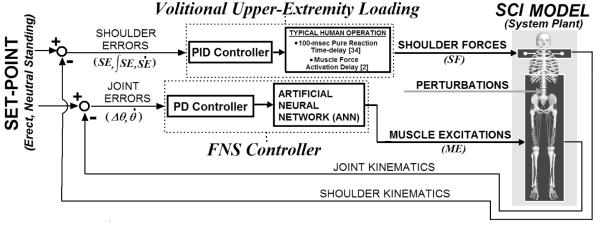
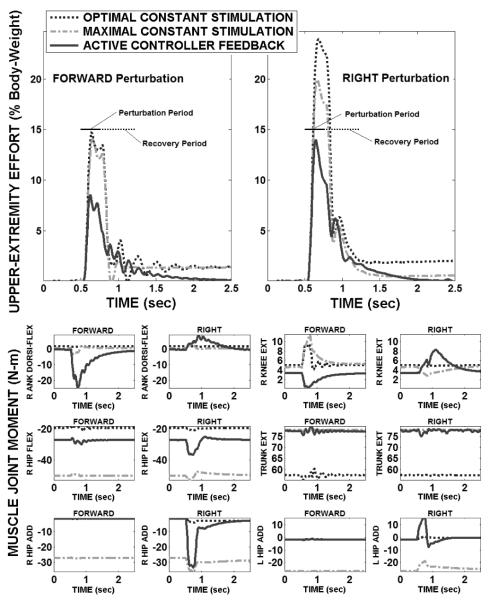
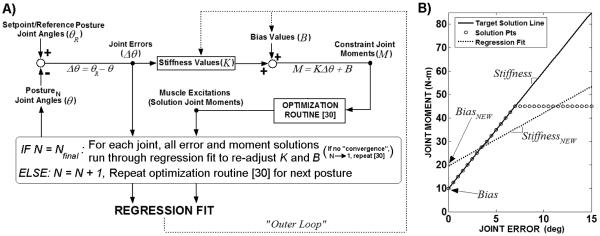
Previous investigations of feedback control of standing after spinal cord injury (SCI) using functional neuromuscular stimulation (FNS) have primarily targeted individual joints. This study assesses the potential efficacy of comprehensive (trunk, hips, knees, and ankles) joint feedback control against postural disturbances using a bipedal, 3-D computer model of SCI stance. Proportional-derivative feedback drove an artificial neural network trained to produce muscle excitation patterns consistent with maximal joint stiffness values achievable about neutral stance given typical SCI muscle properties. Feedback gains were optimized to minimize upper extremity (UE) loading required to stabilize against disturbances. Compared to the baseline case of maximum constant muscle excitations used clinically, the controller reduced UE loading by 55% in resisting external force perturbations and by 84% during simulated one-arm functional tasks. Performance was most sensitive to inaccurate measurements of ankle plantar/dorsiflexion position and hip ab/adduction velocity feedback. In conclusion, comprehensive joint feedback demonstrates potential to markedly improve FNS standing function. However, alternative control structures capable of effective performance with fewer sensor-based feedback parameters may better facilitate clinical usage.
先前使用功能性神经肌肉刺激(FNS)对脊髓损伤(SCI)后站立的反馈控制进行的研究主要针对单个关节。本研究使用 SCI 站立的双足、3D 计算机模型评估了综合(躯干、臀部、膝盖和脚踝)关节反馈控制对姿势干扰的潜在效果。比例微分反馈驱动人工神经网络,该网络经过训练可产生与典型 SCI 肌肉特性下中立位时可实现的最大关节刚度值一致的肌肉兴奋模式。反馈增益经过优化,以最小化抵抗干扰所需的上肢(UE)负载。与临床上常用的最大恒定肌肉激发的基线情况相比,该控制器在抵抗外力干扰时将 UE 负载降低了 55%,在模拟单臂功能任务时降低了 84%。性能对踝关节跖屈/背屈位置和髋关节内收/外展速度反馈的不准确测量最为敏感。总之,综合关节反馈显示出显著改善 FNS 站立功能的潜力。然而,具有更少基于传感器的反馈参数的有效性能的替代控制结构可能更有利于临床应用。