The Sackler School of Physics and Astronomy, Tel Aviv University, Tel Aviv, Israel.
PLoS One. 2011;6(8):e21955. doi: 10.1371/journal.pone.0021955. Epub 2011 Aug 4.
Living cells of many types need to move in response to external stimuli in order to accomplish their functional tasks; these tasks range from wound healing to immune response to fertilization. While the directional motion is typically dictated by an external signal, the actual motility is also restricted by physical constraints, such as the presence of other cells and the extracellular matrix. The ability to successfully navigate in the presence of obstacles is not only essential for organisms, but might prove relevant in the study of autonomous robotic motion.
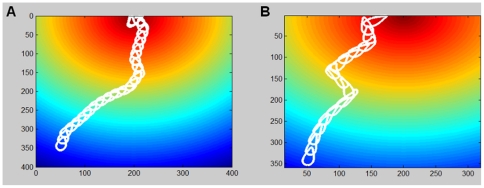
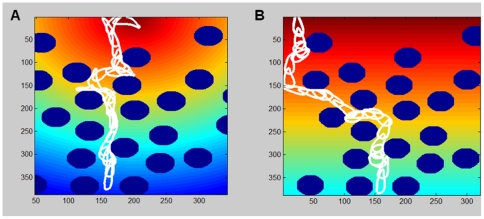
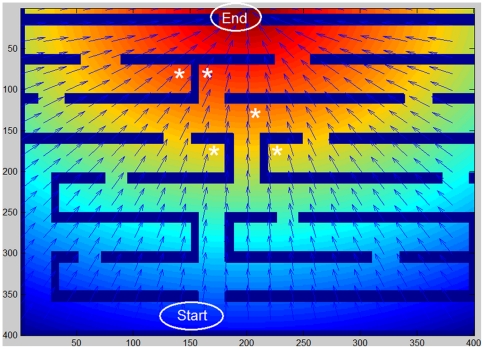
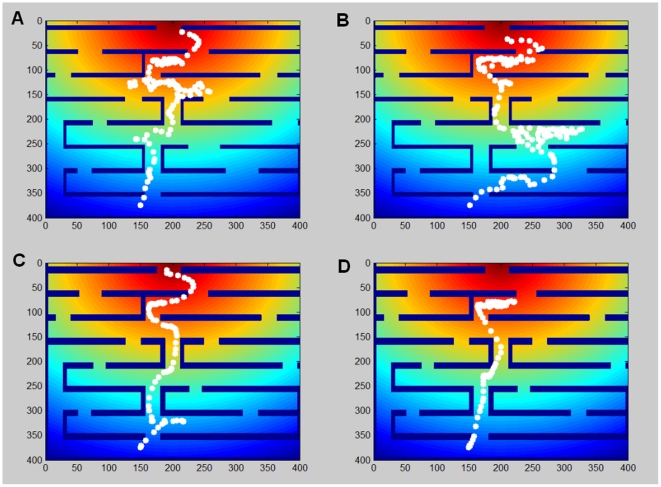
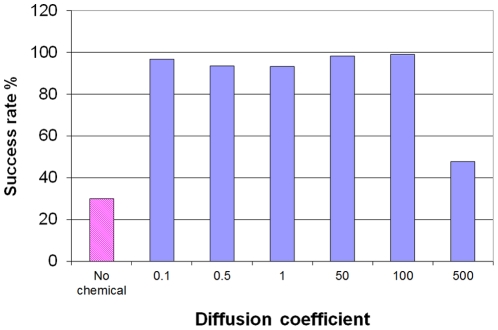
METHODOLOGY/PRINCIPAL FINDINGS: We study a computational model of amoeboid chemotactic navigation under differing conditions, from motion in an obstacle-free environment to navigation between obstacles and finally to moving in a maze. We use the maze as a simple stand-in for a motion task with severe constraints, as might be expected in dense extracellular matrix. Whereas agents using simple chemotaxis can successfully navigate around small obstacles, the presence of large barriers can often lead to agent trapping. We further show that employing a simple memory mechanism, namely secretion of a repulsive chemical by the agent, helps the agent escape from such trapping.
CONCLUSIONS/SIGNIFICANCE: Our main conclusion is that cells employing simple chemotactic strategies will often be unable to navigate through maze-like geometries, but a simple chemical marker mechanism (which we refer to as "self-assistance") significantly improves success rates. This realization provides important insights into mechanisms that might be employed by real cells migrating in complex environments as well as clues for the design of robotic navigation strategies. The results can be extended to more complicated multi-cellular systems and can be used in the study of mammalian cell migration and cancer metastasis.
为了完成其功能任务,许多类型的活细胞需要对外界刺激做出反应来进行移动;这些任务的范围从伤口愈合到免疫反应再到受精。虽然定向运动通常由外部信号决定,但实际的运动也受到物理限制的限制,例如其他细胞和细胞外基质的存在。成功地在障碍物存在的情况下进行导航不仅对生物体至关重要,而且在自主机器人运动的研究中可能也具有相关性。
方法/主要发现:我们研究了在不同条件下阿米巴原虫趋化性导航的计算模型,从无障碍物环境中的运动到障碍物之间的导航,最后到在迷宫中移动。我们使用迷宫作为具有严重约束的运动任务的简单替代品,这可能是在密集的细胞外基质中所预期的。虽然使用简单趋化性的代理可以成功地绕过小障碍物,但大障碍物的存在常常会导致代理被捕获。我们进一步表明,采用简单的记忆机制,即代理分泌一种排斥性化学物质,可以帮助代理摆脱这种捕获。
结论/意义:我们的主要结论是,采用简单趋化性策略的细胞通常无法在类似迷宫的几何形状中导航,但简单的化学标记机制(我们称之为“自我协助”)显著提高了成功率。这一认识为在复杂环境中迁移的真实细胞可能采用的机制提供了重要的见解,并为机器人导航策略的设计提供了线索。该结果可以扩展到更复杂的多细胞系统,并可用于研究哺乳动物细胞迁移和癌症转移。