Dupont Pierre E, Lock Jesse, Itkowitz Brandon
Mechanical Engineering, Boston University, Boston, MA 02215 USA (phone: 617-353-9596; fax: 617-353-5866.
IEEE Int Conf Robot Autom. 2010 May 3;2010:562-568. doi: 10.1109/ROBOT.2010.5509311.
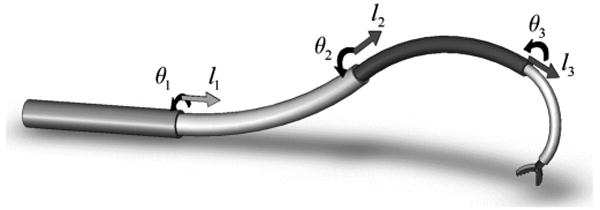
A novel approach to constructing robots is based on concentrically combining pre-curved elastic tubes. By rotating and extending the tubes with respect to each other, their curvatures interact elastically to position and orient the robot's tip, as well as to control the robot's shape along its length. Since these robots form slender curves, they are well suited for minimally invasive medical procedures. A substantial challenge to their practical use is the real-time solution of their kinematics that are described by differential equations with split boundary equations. This paper proposes a numerically efficient approach to real-time position control. It is shown that the forward kinematics are smooth functions that can be pre-computed and accurately approximated using Fourier series. The inverse kinematics can be solved in real time using root finding applied to the functional approximation. Experimental demonstration of real-time position control using this approach is also described.
一种构建机器人的新颖方法是基于将预弯曲的弹性管同心组合。通过使这些管子相对于彼此旋转和伸展,它们的曲率会弹性相互作用,从而确定机器人尖端的位置和方向,并控制机器人沿其长度的形状。由于这些机器人形成细长的曲线,因此非常适合微创医疗程序。它们实际应用中的一个重大挑战是求解由带有分裂边界方程的微分方程描述的运动学的实时解。本文提出了一种数值高效的实时位置控制方法。结果表明,正向运动学是光滑函数,可以预先计算并使用傅里叶级数进行精确近似。逆运动学可以通过应用于函数近似的求根方法实时求解。本文还描述了使用这种方法进行实时位置控制的实验演示。