Anor Tomer, Madsen Joseph R, Dupont Pierre
Department of Neurosurgery, Children's Hospital Boston, Harvard Medical School, Boston, MA 02115 USA (
IEEE Int Conf Robot Autom. 2011 May 9:667-673. doi: 10.1109/ICRA.2011.5980311.
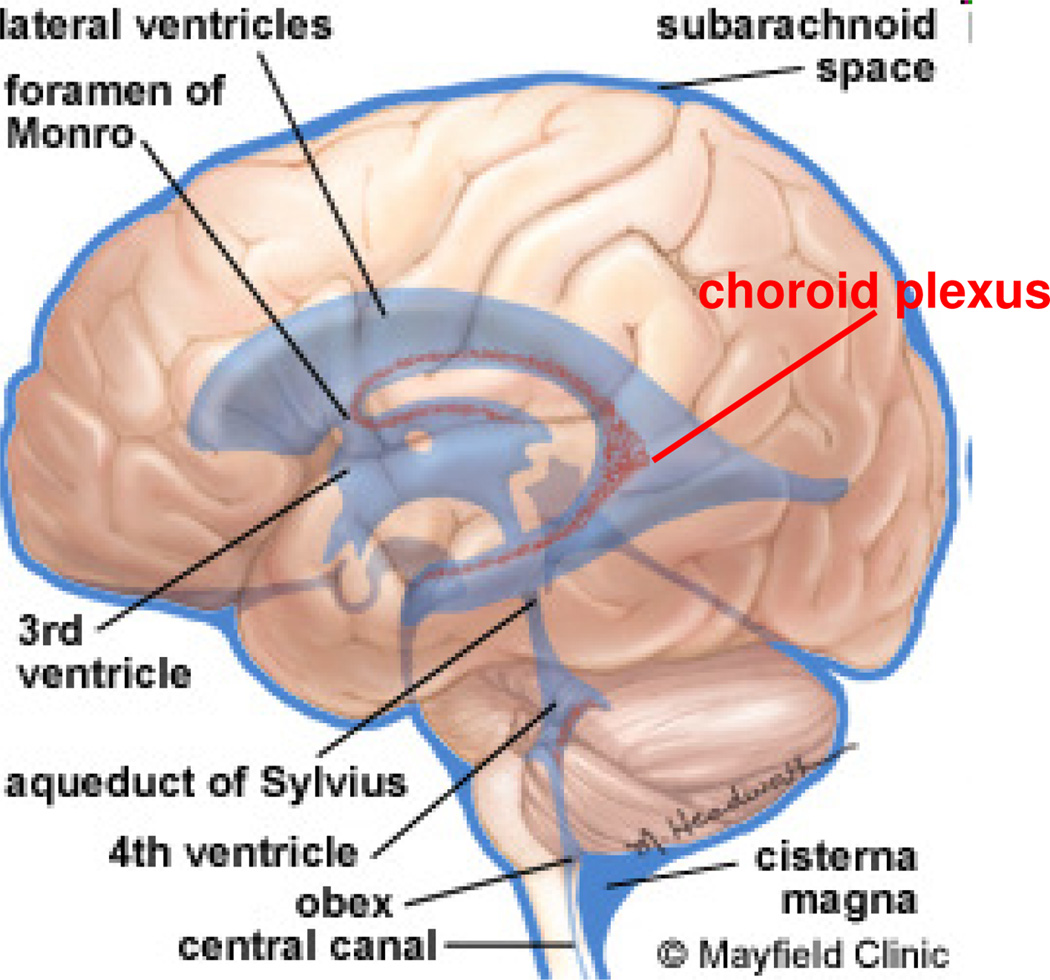
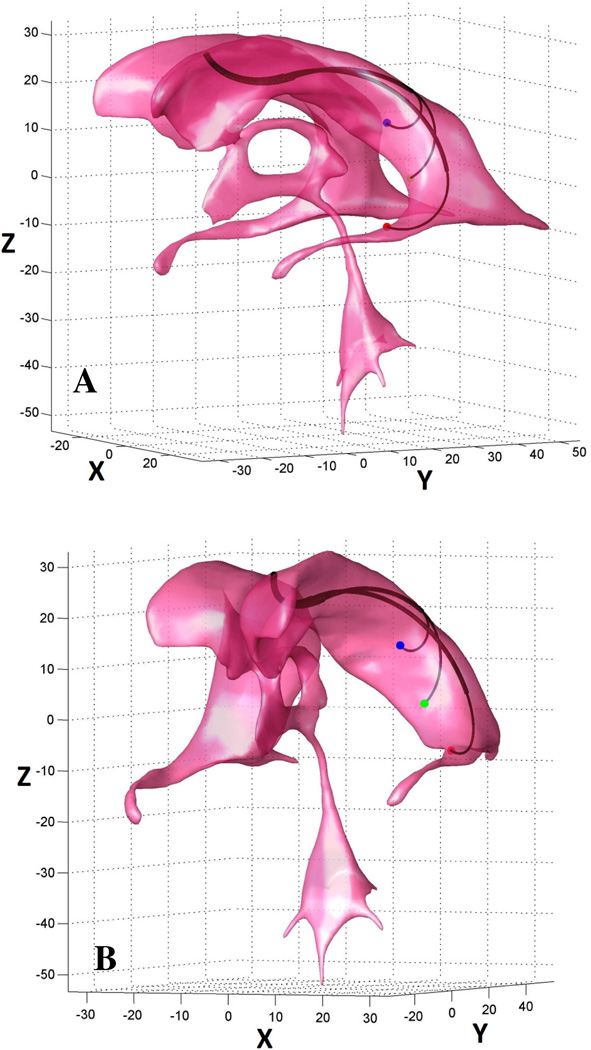
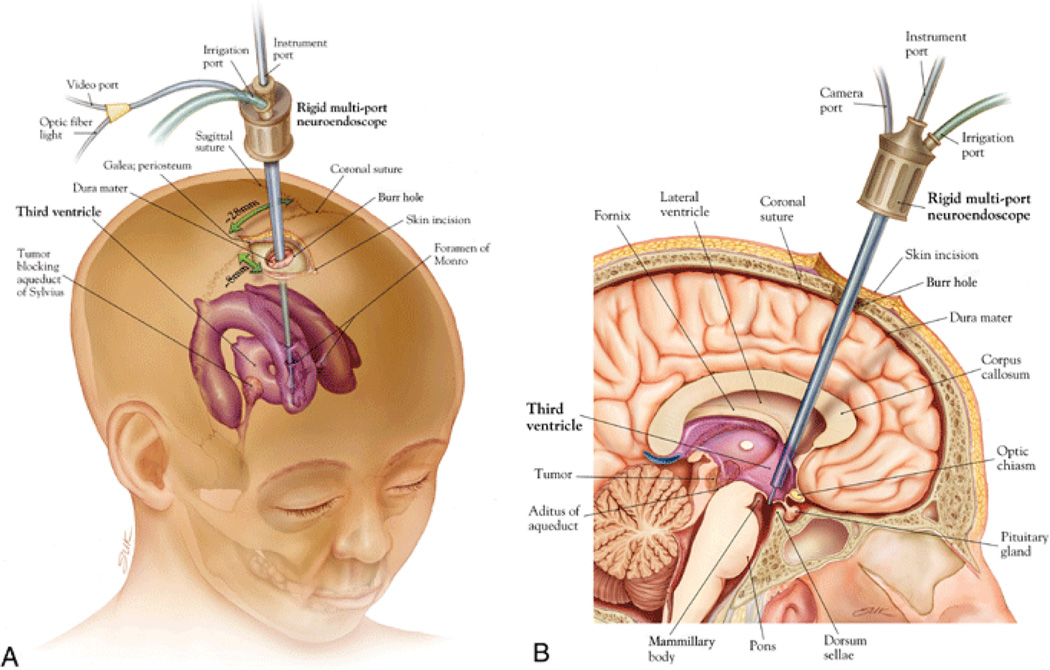
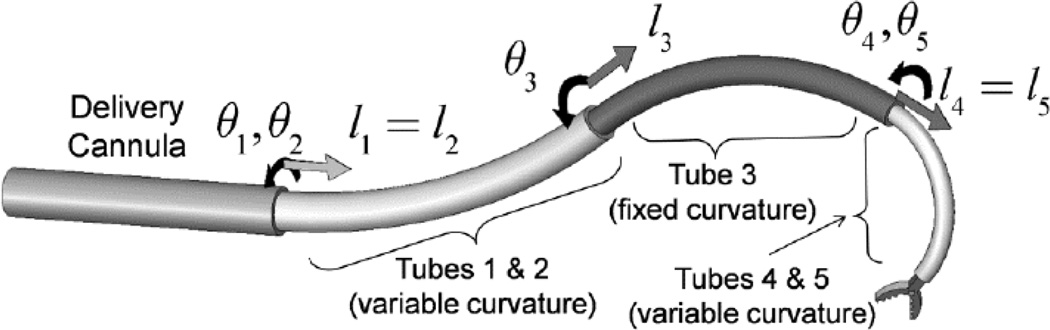
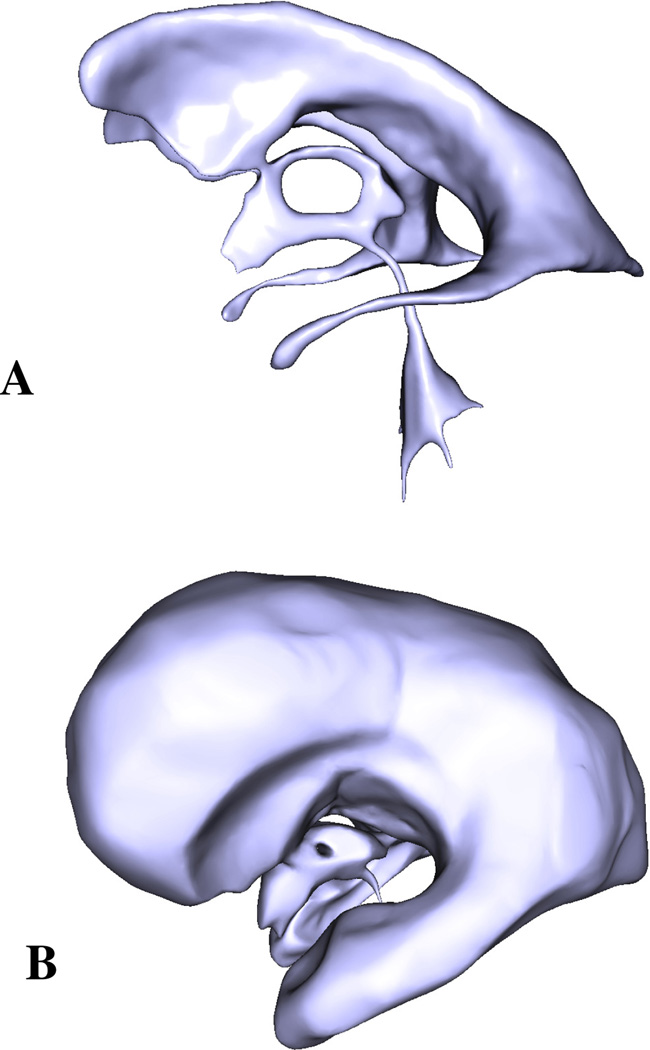
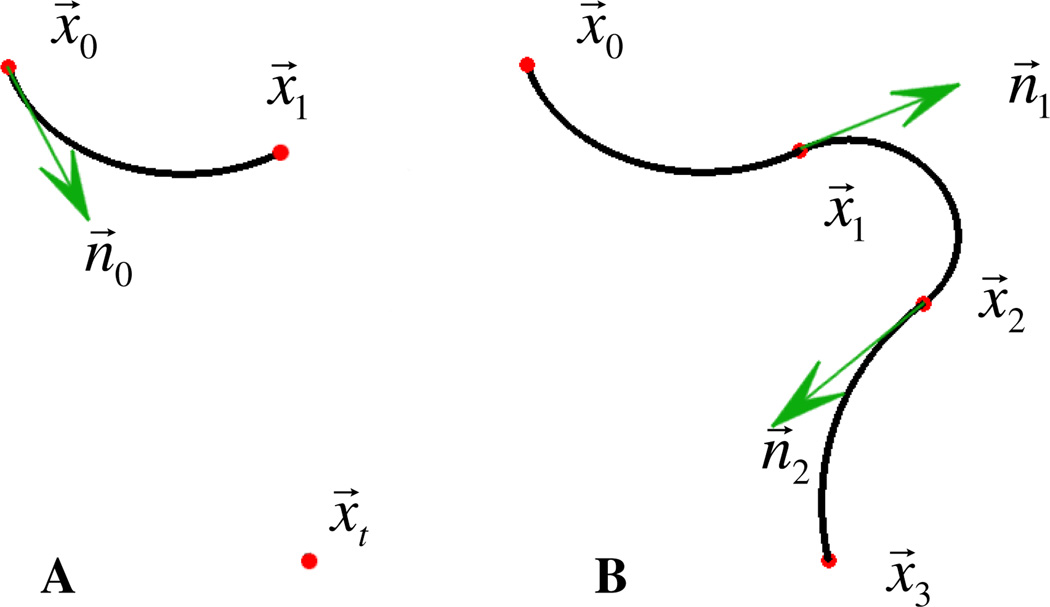
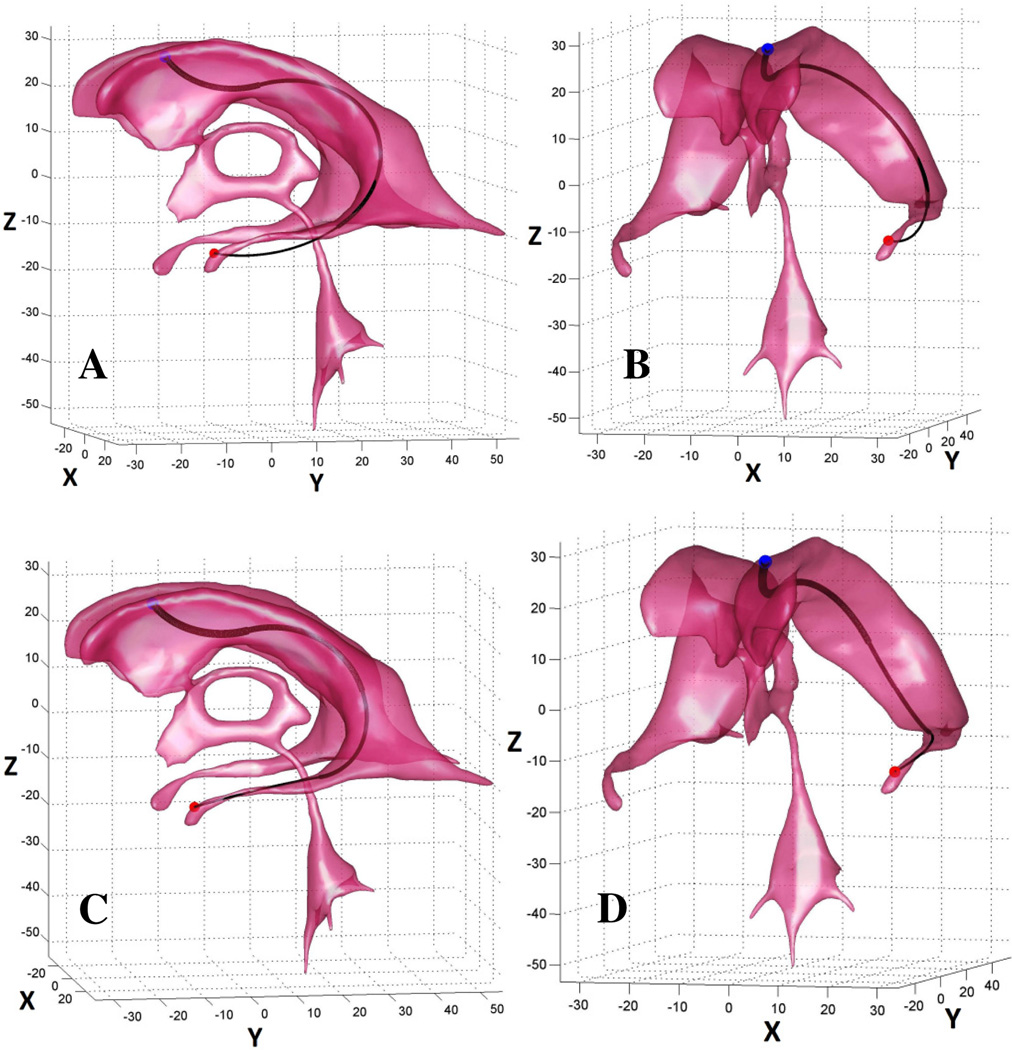
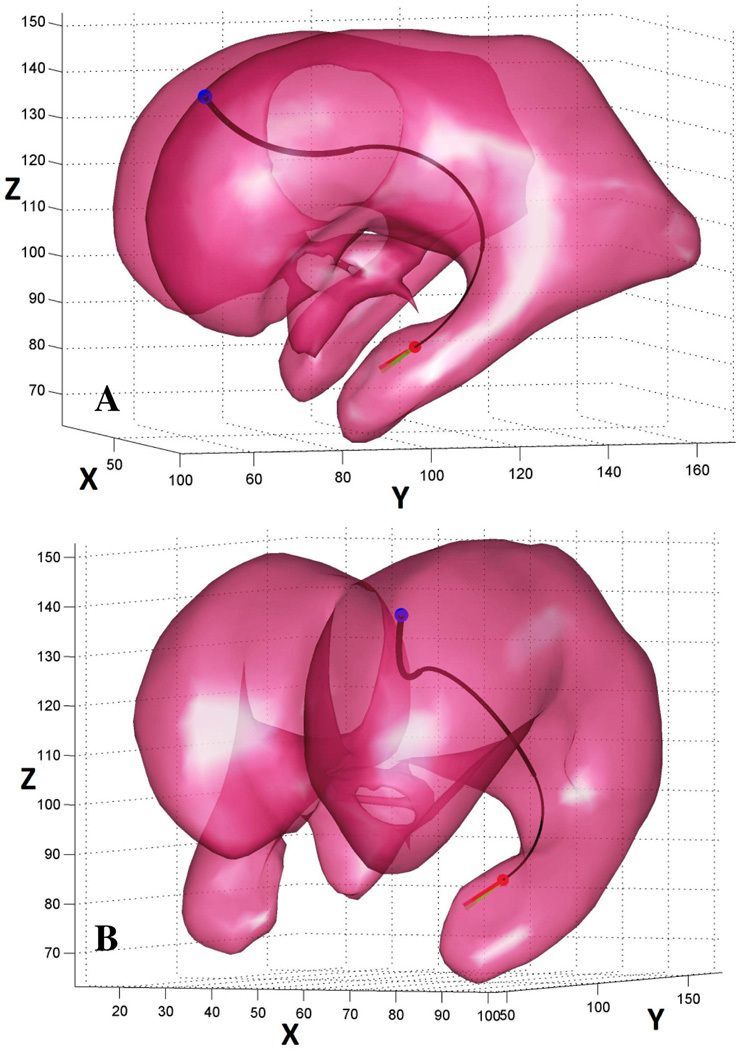
We propose a novel systematic approach to optimizing the design of concentric tube robots for neurosurgical procedures. These procedures require that the robot approach specified target sites while navigating and operating within an anatomically constrained work space. The availability of preoperative imaging makes our approach particularly suited for neurosurgery, and we illustrate the method with the example of endoscopic choroid plexus ablation. A novel parameterization of the robot characteristics is used in conjunction with a global pattern search optimization method. The formulation returns the design of the least-complex robot capable of reaching single or multiple target points in a confined space with constrained optimization metrics. A particular advantage of this approach is that it identifies the need for either fixed-curvature versus variable-curvature sections. We demonstrate the performance of the method in four clinically relevant examples.
我们提出了一种新颖的系统方法,用于优化神经外科手术中同心管机器人的设计。这些手术要求机器人在解剖结构受限的工作空间内导航和操作时接近指定的目标部位。术前成像的可用性使我们的方法特别适用于神经外科手术,我们以内镜脉络丛消融为例来说明该方法。机器人特性的一种新颖参数化方法与全局模式搜索优化方法结合使用。该公式返回能够在受限空间内以受限优化指标到达单个或多个目标点的最不复杂机器人的设计。这种方法的一个特别优点是它确定了对固定曲率与可变曲率部分的需求。我们在四个临床相关示例中展示了该方法的性能。