Mechanical Engineering Department, Massachusetts Institute of Technology, Cambridge, MA 02139, USA.
IEEE Trans Neural Syst Rehabil Eng. 2012 Jan;20(1):48-57. doi: 10.1109/TNSRE.2011.2175008. Epub 2011 Dec 16.
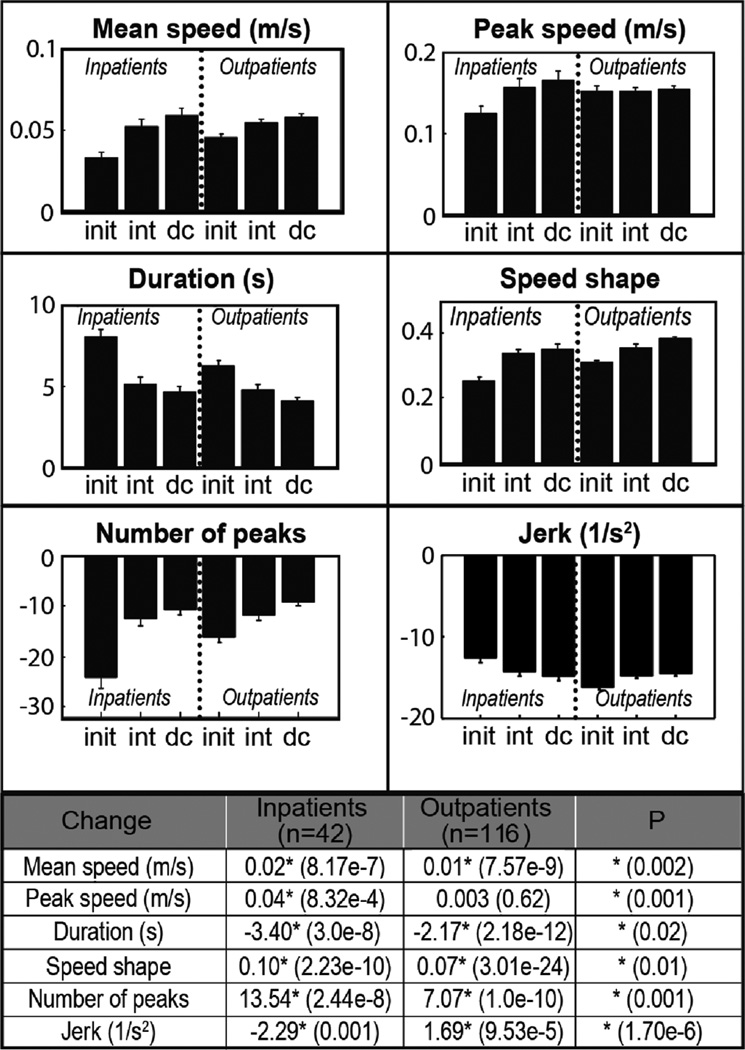
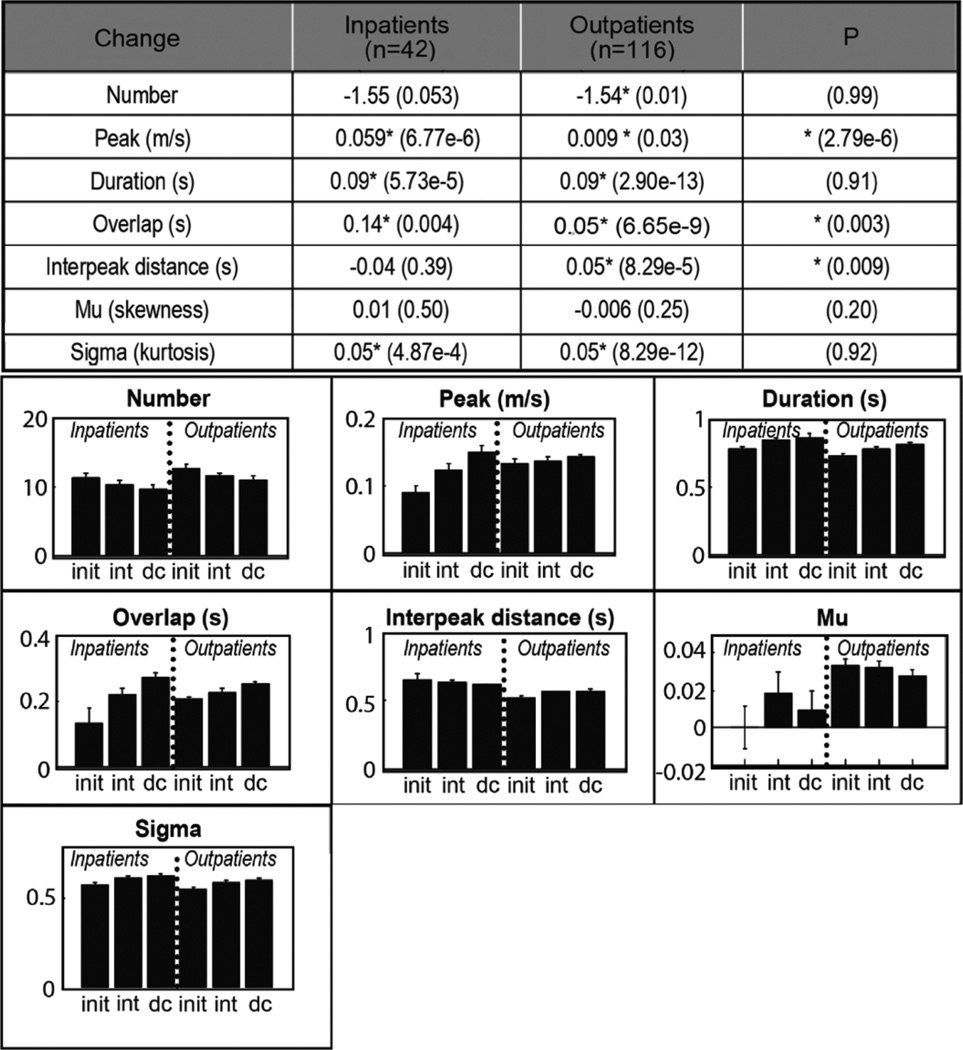
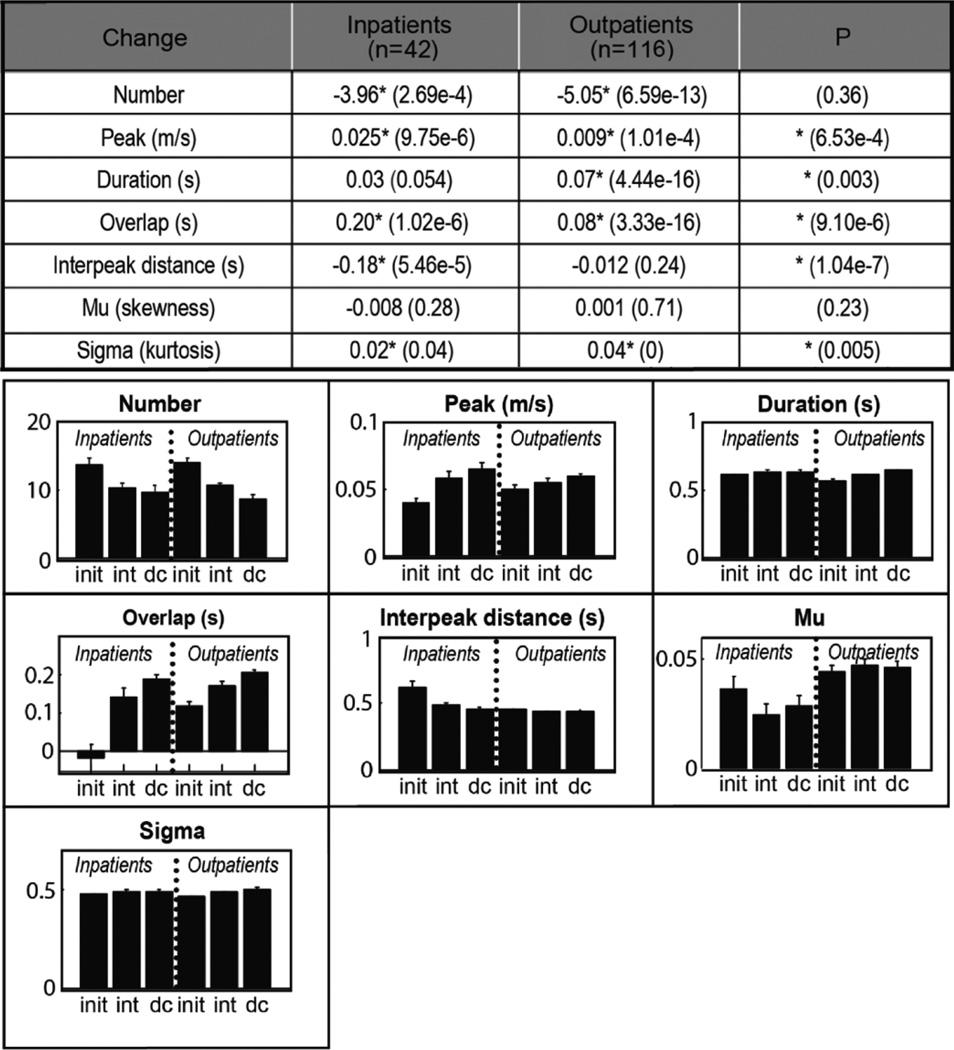
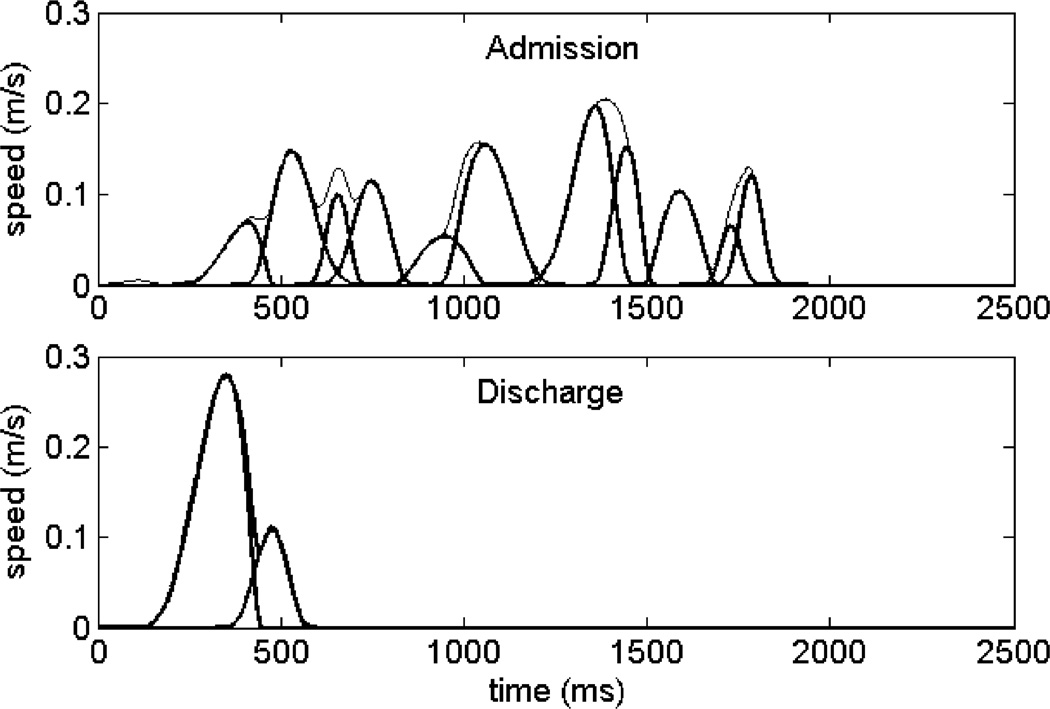
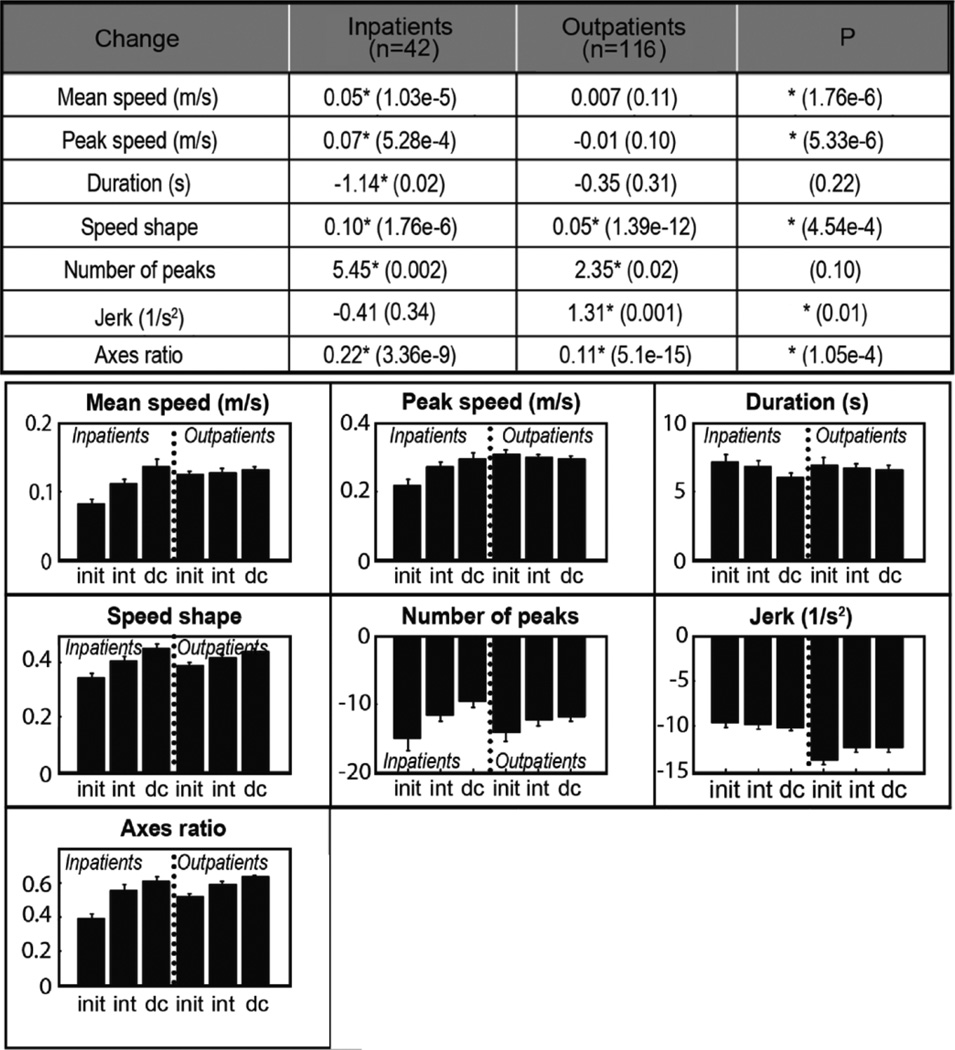
Both the American Heart Association and the VA/DoD endorse upper-extremity robot-mediated rehabilitation therapy for stroke care. However, we do not know yet how to optimize therapy for a particular patient's needs. Here, we explore whether we must train patients for each functional task that they must perform during their activities of daily living or alternatively capacitate patients to perform a class of tasks and have therapists assist them later in translating the observed gains into activities of daily living. The former implies that motor adaptation is a better model for motor recovery. The latter implies that motor learning (which allows for generalization) is a better model for motor recovery. We quantified trained and untrained movements performed by 158 recovering stroke patients via 13 metrics, including movement smoothness and submovements. Improvements were observed both in trained and untrained movements suggesting that generalization occurred. Our findings suggest that, as motor recovery progresses, an internal representation of the task is rebuilt by the brain in a process that better resembles motor learning than motor adaptation. Our findings highlight possible improvements for therapeutic algorithms design, suggesting sparse-activity-set training should suffice over exhaustive sets of task specific training.
美国心脏协会和 VA/DoD 都认可上肢机器人介导的康复治疗用于脑卒中护理。然而,我们还不知道如何根据特定患者的需求来优化治疗方案。在这里,我们探讨了是否必须针对患者在日常生活活动中必须执行的每项功能任务对其进行训练,或者是否可以使患者具备执行一类任务的能力,并由治疗师在后期将观察到的收益转化为日常生活活动。前者意味着运动适应是运动恢复的更好模型。后者意味着运动学习(允许泛化)是运动恢复的更好模型。我们通过 13 项指标(包括运动平滑度和子运动)量化了 158 名恢复中的脑卒中患者的训练和未训练运动。在训练和未训练运动中都观察到了改善,这表明发生了泛化。我们的研究结果表明,随着运动恢复的进展,大脑以一种更类似于运动学习而不是运动适应的过程重建任务的内部表示。我们的研究结果强调了治疗算法设计的可能改进,表明稀疏活动集训练应该足以满足特定任务的详尽训练集。