The Hamlyn Centre for Robotic Surgery, Imperial College London, London, SW7 2AZ, UK.
Int J Comput Assist Radiol Surg. 2019 Jul;14(7):1137-1146. doi: 10.1007/s11548-019-01972-8. Epub 2019 Apr 15.
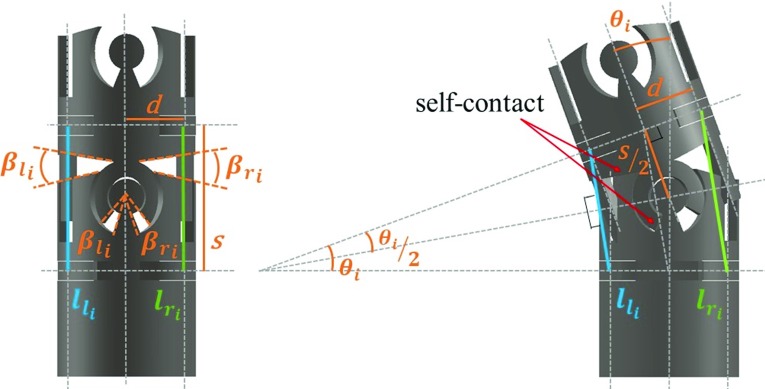
A laser-profiled continuum robot (CR) with a series of interlocking joints has been developed in our center to reach deeper areas of the airways. However, it deflects with constant curvature, which thus increases the difficulty of entering specific bronchi without relying on the tissue reaction forces. This paper aims to propose an optimization framework to find the best design parameters for nonconstant curvature CRs to reach distal targets while attempting to avoid the collision with the surrounding tissue.
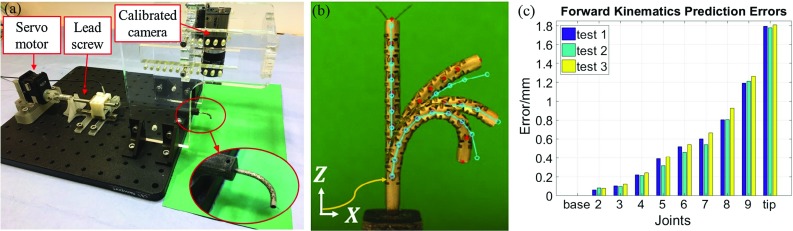
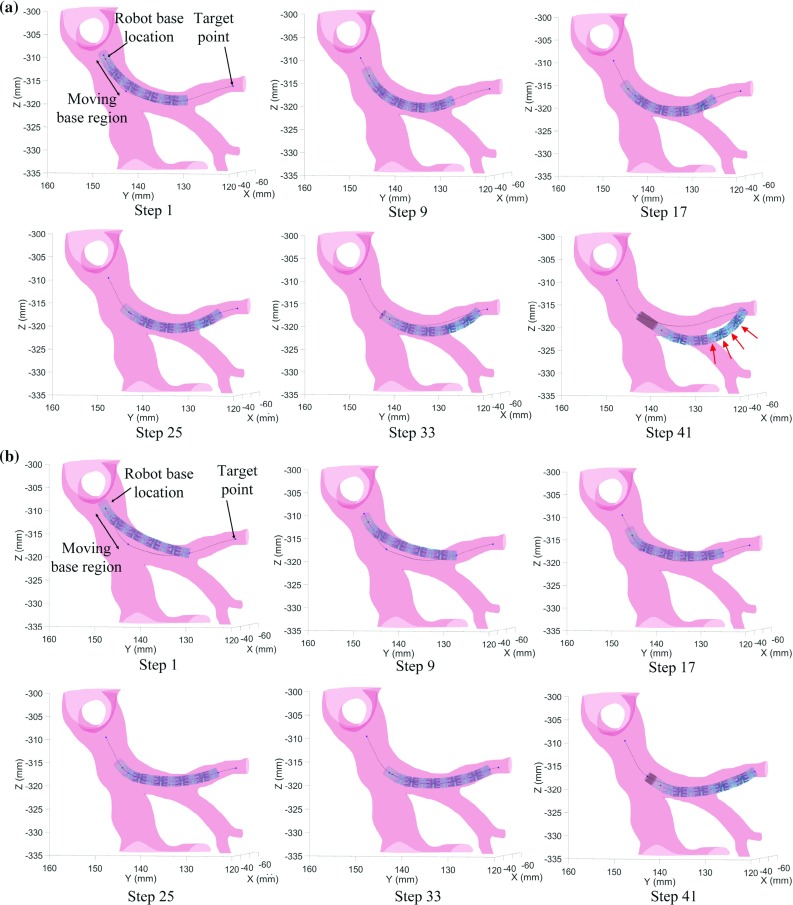
First, the contact-aided compliant mechanisms (CCMs) are integrated with the continuum robot to achieve the nonconstant curvature. Second, forward kinematics considering CCMs is built. Third, inverse kinematics is implemented to steer the robot tip toward the desired targets within the confined anatomy. Finally, an optimization framework is proposed to find the best robot design to reach the target with the least collision to the bronchi walls.
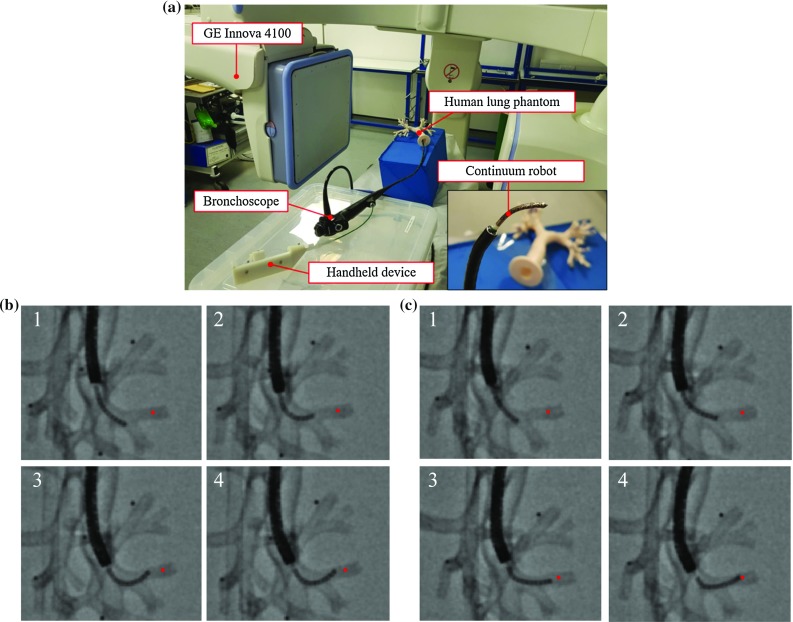
Experiments are carried out to verify the feasibility of CCMs to enable the nonconstant curvature deflection, and simulations demonstrate a lower cost function value to reach a target for the nonconstant curvature optimized design with respect to the standard constant curvature robot (0.11 vs. 2.66). In addition, the higher capacity of the optimized design to complete the task is validated by interventional experiments using fluoroscopy.
Results demonstrate the effectiveness of the proposed framework to find an optimized CR with nonconstant curvature to perform safer interventions to reach distal targets.
我们中心开发了一种具有一系列互锁关节的激光成型连续体机器人(CR),以到达气道的更深部位。然而,它以恒定曲率偏转,这就增加了在不依赖组织反作用力的情况下进入特定支气管的难度。本文旨在提出一个优化框架,以找到最佳的非恒定曲率 CR 设计参数,以在试图避免与周围组织碰撞的情况下到达远端目标。
首先,将接触辅助柔顺机构(CCM)与连续体机器人集成,以实现非恒定曲率。其次,构建考虑 CCM 的正向运动学。第三,实施逆运动学,以在受限解剖结构内将机器人末端引导至期望的目标。最后,提出了一个优化框架,以找到最佳的机器人设计,以最小的碰撞到达目标。
进行了实验以验证 CCM 实现非恒定曲率偏转的可行性,并且模拟表明非恒定曲率优化设计到达目标的成本函数值较低(0.11 与 2.66 相比)。此外,通过使用透视法进行介入实验验证了优化设计完成任务的更高能力。
结果表明,该框架可有效找到具有非恒定曲率的优化 CR,以执行更安全的干预措施到达远端目标。