Division of Electrical, Electronic and Computer Engineering, Chonbuk National University, Jeonju 561-756, Korea; E-mail:
Sensors (Basel). 2009;9(9):7550-65. doi: 10.3390/s90907550. Epub 2009 Sep 23.
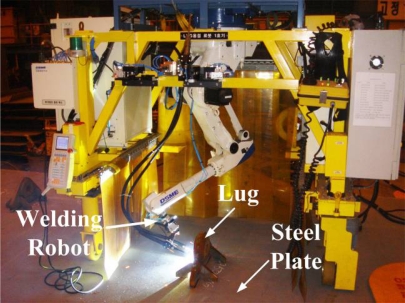
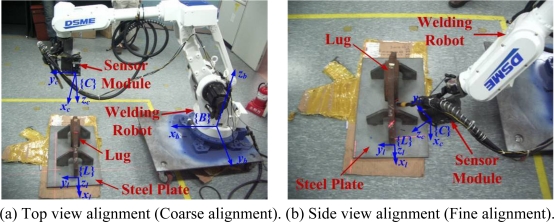
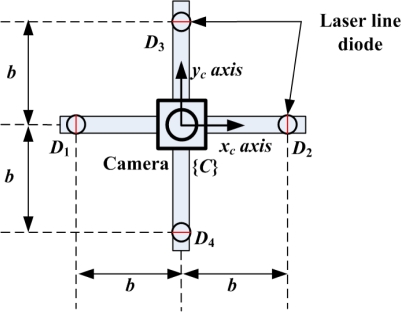
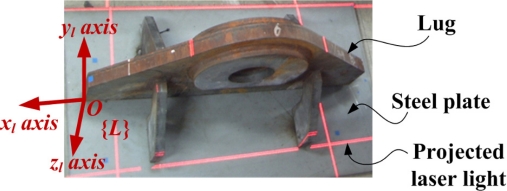
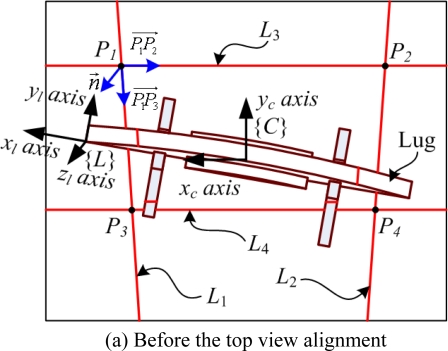
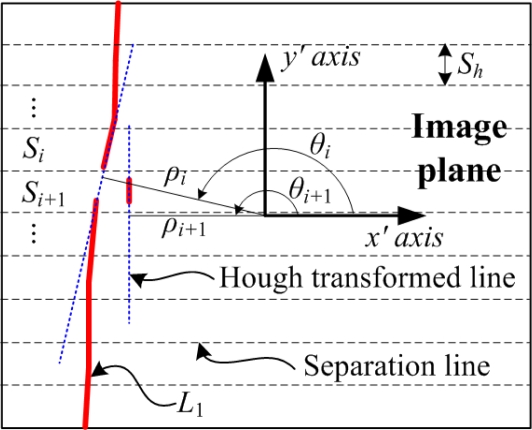
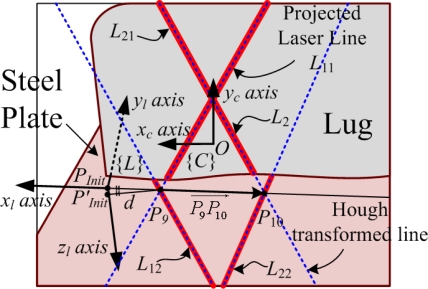
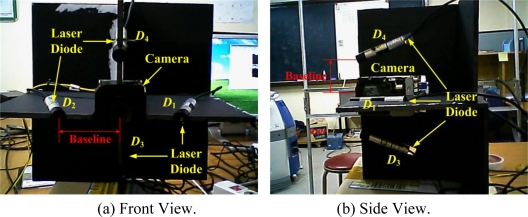
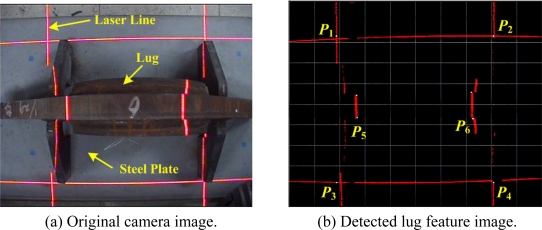
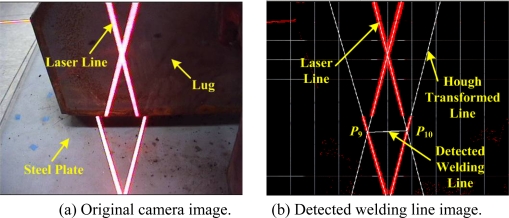
In this study, we propose a precise 3D lug pose detection sensor for automatic robot welding of a lug to a huge steel plate used in shipbuilding, where the lug is a handle to carry the huge steel plate. The proposed sensor consists of a camera and four laser line diodes, and its design parameters are determined by analyzing its detectable range and resolution. For the lug pose acquisition, four laser lines are projected on both lug and plate, and the projected lines are detected by the camera. For robust detection of the projected lines against the illumination change, the vertical threshold, thinning, Hough transform and separated Hough transform algorithms are successively applied to the camera image. The lug pose acquisition is carried out by two stages: the top view alignment and the side view alignment. The top view alignment is to detect the coarse lug pose relatively far from the lug, and the side view alignment is to detect the fine lug pose close to the lug. After the top view alignment, the robot is controlled to move close to the side of the lug for the side view alignment. By this way, the precise 3D lug pose can be obtained. Finally, experiments with the sensor prototype are carried out to verify the feasibility and effectiveness of the proposed sensor.
在这项研究中,我们提出了一种精确的 3D 凸耳位置检测传感器,用于自动机器人焊接凸耳到造船中使用的巨大钢板,凸耳是搬运巨大钢板的把手。该传感器由一个摄像头和四个激光线二极管组成,其设计参数通过分析其可检测范围和分辨率来确定。为了获取凸耳位置,将四条激光线投射到凸耳和钢板上,然后摄像头检测到这些线。为了对光照变化具有鲁棒性的检测到投射线,对摄像头图像依次应用了垂直阈值、细化、霍夫变换和分离霍夫变换算法。凸耳位置的获取分为两个阶段:顶视图对准和侧视图对准。顶视图对准用于检测相对远离凸耳的粗凸耳位置,侧视图对准用于检测靠近凸耳的细凸耳位置。在顶视图对准之后,机器人被控制移动到凸耳的侧面以进行侧视图对准。通过这种方式,可以获得精确的 3D 凸耳位置。最后,通过传感器原型进行实验,验证了所提出的传感器的可行性和有效性。