Laboratory of Computational Sensing and Robotics, The Johns Hopkins University, Baltimore, MD 21218, USA.
IEEE Trans Biomed Eng. 2012 Aug;59(8):2291-301. doi: 10.1109/TBME.2012.2202903. Epub 2012 Jun 5.
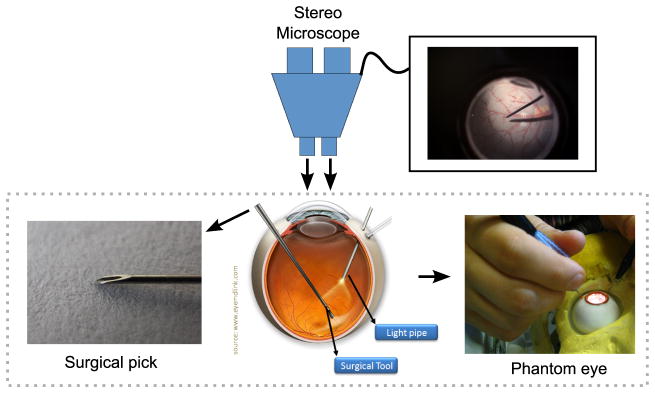
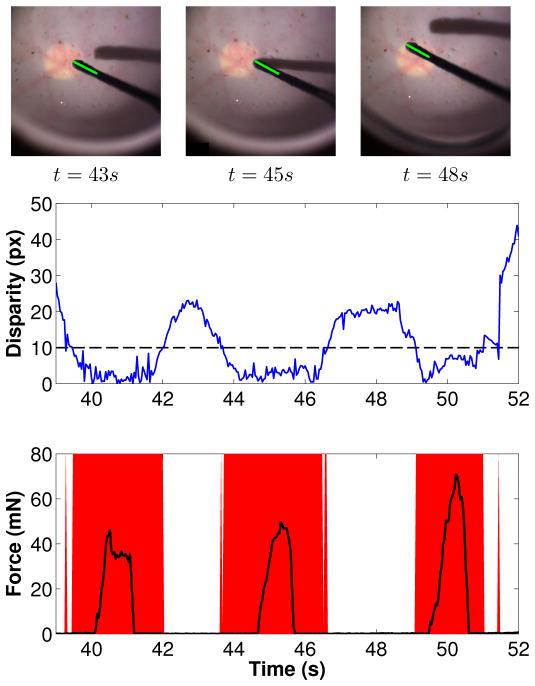
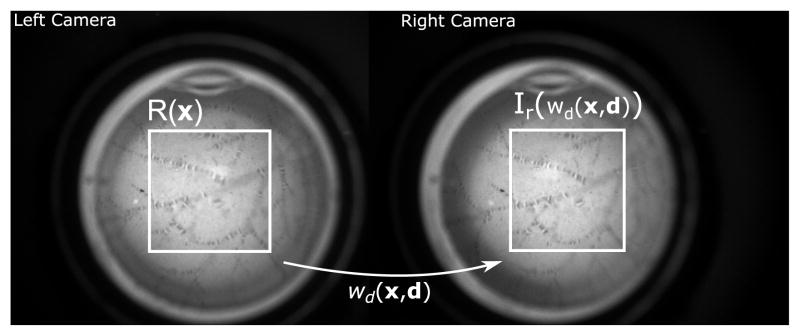
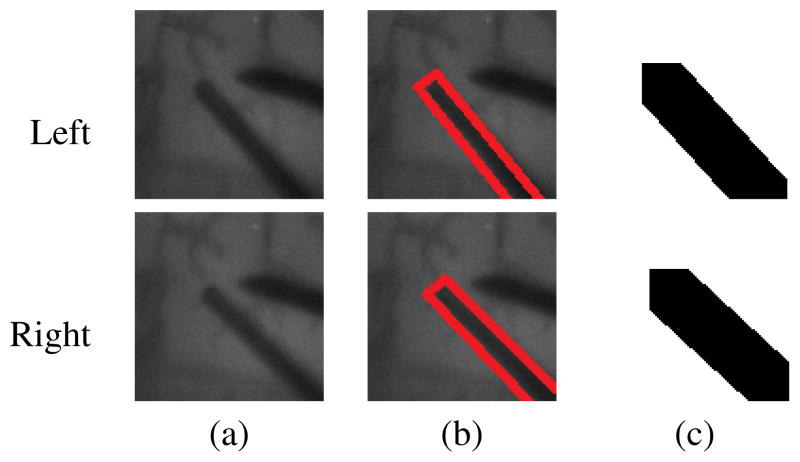
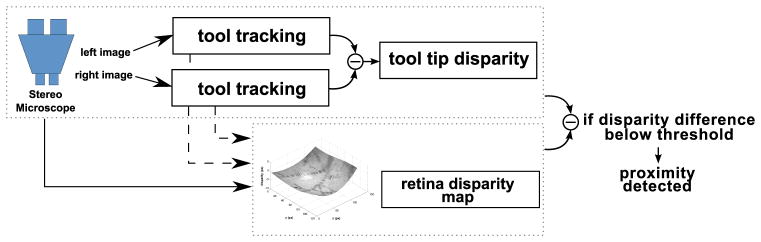
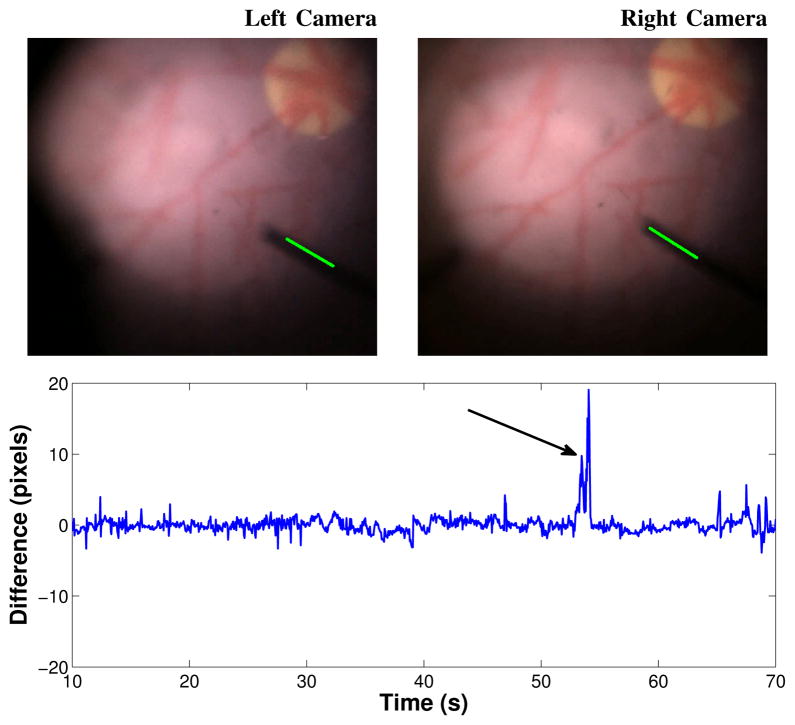
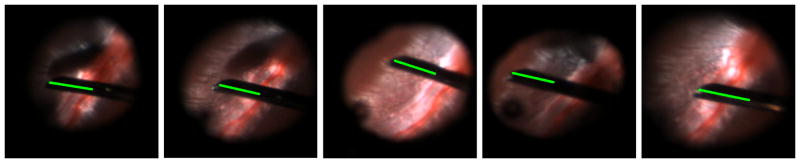
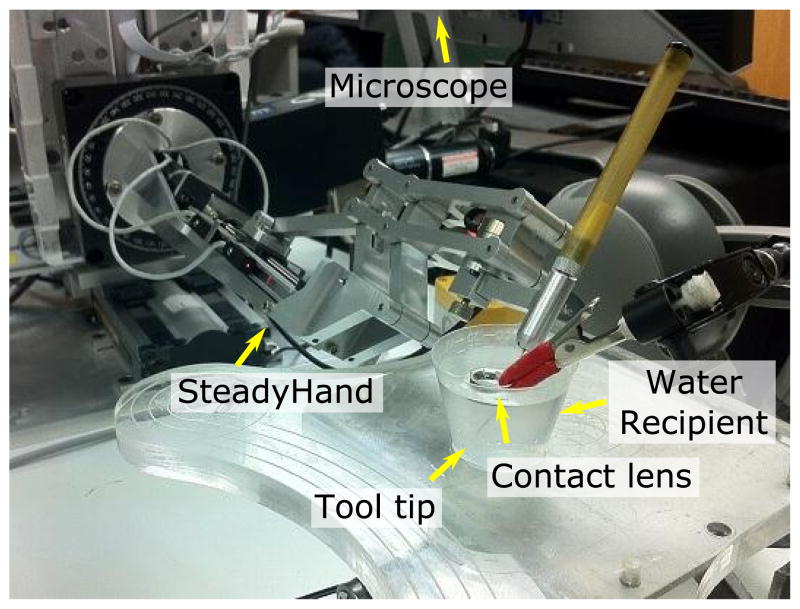
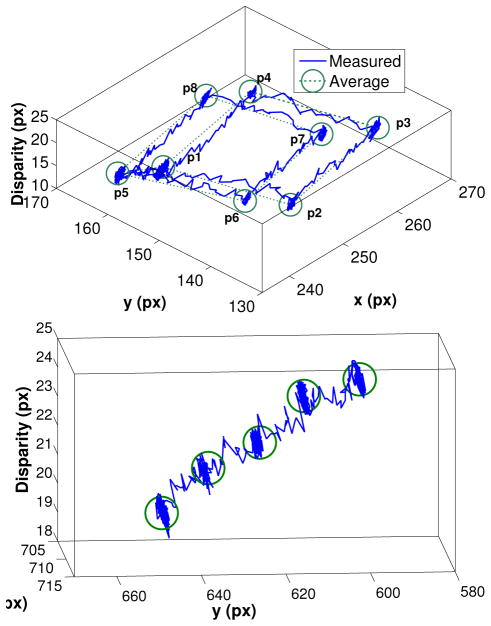
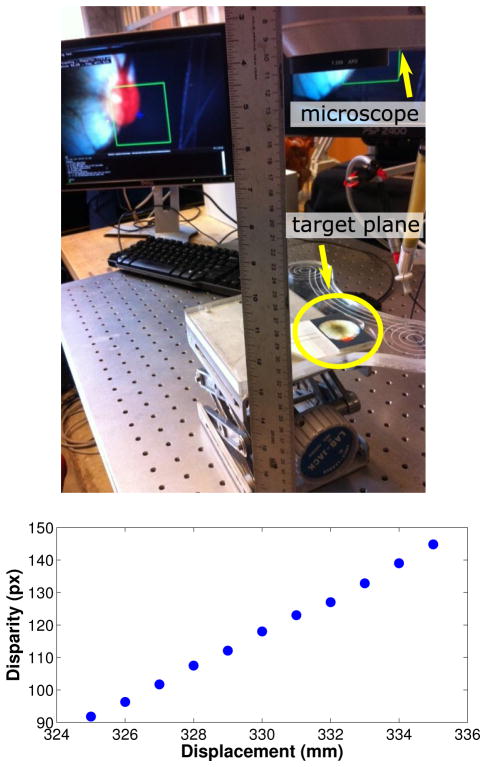
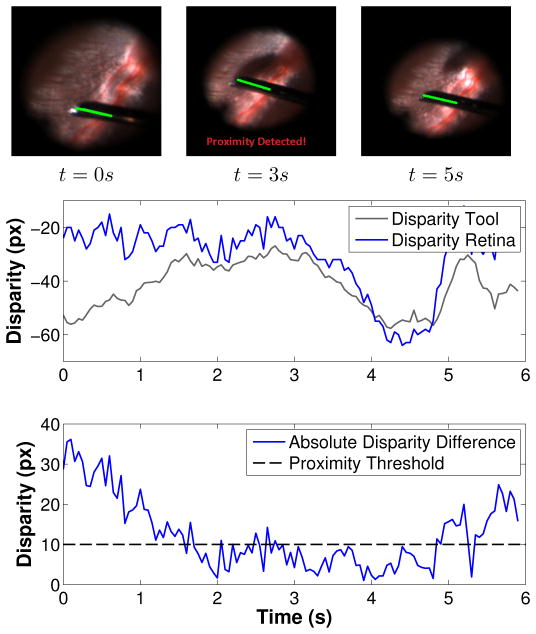
In retinal surgery, surgeons face difficulties such as indirect visualization of surgical targets, physiological tremor, and lack of tactile feedback, which increase the risk of retinal damage caused by incorrect surgical gestures. In this context, intraocular proximity sensing has the potential to overcome current technical limitations and increase surgical safety. In this paper, we present a system for detecting unintentional collisions between surgical tools and the retina using the visual feedback provided by the opthalmic stereo microscope. Using stereo images, proximity between surgical tools and the retinal surface can be detected when their relative stereo disparity is small. For this purpose, we developed a system comprised of two modules. The first is a module for tracking the surgical tool position on both stereo images. The second is a disparity tracking module for estimating a stereo disparity map of the retinal surface. Both modules were specially tailored for coping with the challenging visualization conditions in retinal surgery. The potential clinical value of the proposed method is demonstrated by extensive testing using a silicon phantom eye and recorded rabbit in vivo data.
在视网膜手术中,外科医生面临间接可视化手术目标、生理震颤和缺乏触觉反馈等困难,这些都增加了因手术手势不当而导致视网膜损伤的风险。在这种情况下,眼内接近感应有可能克服当前的技术限制,提高手术安全性。在本文中,我们提出了一种使用眼科立体显微镜提供的视觉反馈来检测手术工具与视网膜之间意外碰撞的系统。使用立体图像,当手术工具和视网膜表面之间的相对立体视差较小时,可以检测到它们之间的接近程度。为此,我们开发了一个由两个模块组成的系统。第一个模块是用于在两幅立体图像上跟踪手术工具位置的模块。第二个模块是用于估计视网膜表面立体视差图的视差跟踪模块。这两个模块都是专门为应对视网膜手术中具有挑战性的可视化条件而设计的。通过使用硅质人工眼球和记录的兔子体内数据进行广泛测试,证明了所提出方法的潜在临床价值。