James Buchanan Brady Urological Institute, Johns Hopkins Medical Institutions, Baltimore, Maryland 21287-2101, USA.
J Urol. 2012 Dec;188(6):2404-9. doi: 10.1016/j.juro.2012.07.107. Epub 2012 Oct 22.
Transrectal ultrasound guided prostate biopsy results rely on physician ability to target the gland according to the biopsy schema. However, to our knowledge it is unknown how accurately the freehand, transrectal ultrasound guided biopsy cores are placed in the prostate and how the geometric distribution of biopsy cores may affect the prostate cancer detection rate.
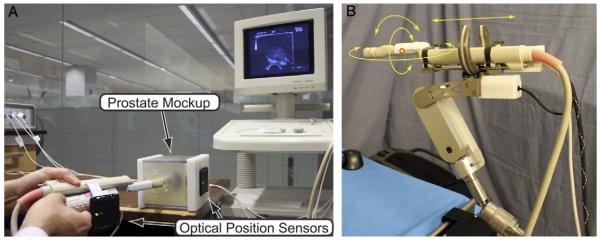
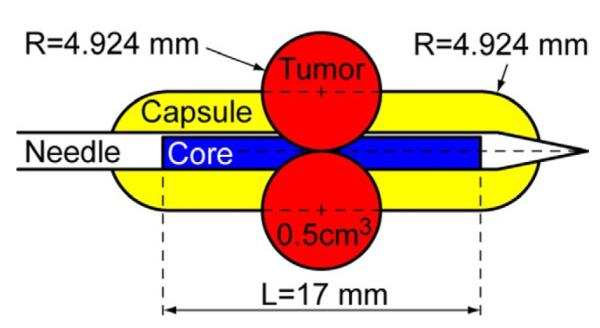
To determine the geometric distribution of cores, we developed a biopsy simulation system with pelvic mock-ups and an optical tracking system. Mock-ups were biopsied in a freehand manner by 5 urologists and by our transrectal ultrasound robot, which can support and move the transrectal ultrasound probe. We compared 1) targeting errors, 2) the accuracy and precision of repeat biopsies, and 3) the estimated significant prostate cancer (0.5 cm(3) or greater) detection rate using a probability based model.
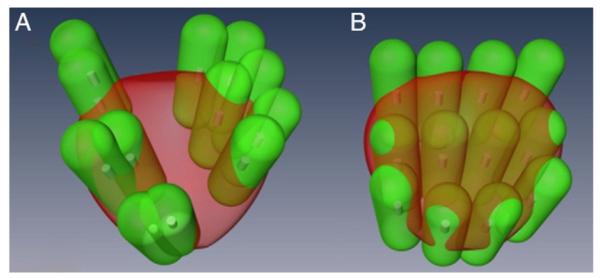
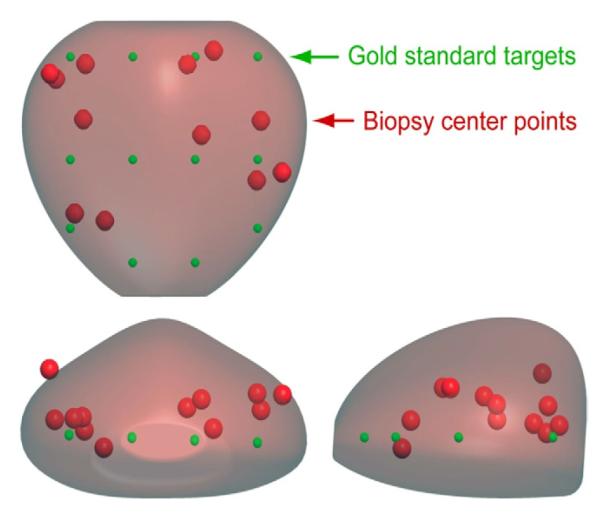
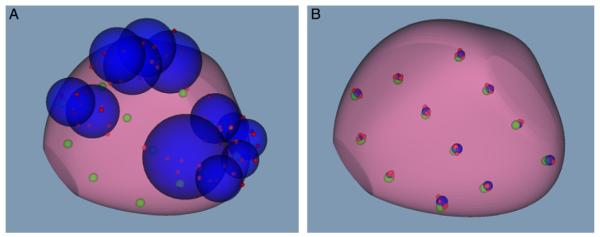
Urologists biopsied cores in clustered patterns and under sampled a significant portion of the prostate. The robot closely followed the predefined biopsy schema. The mean targeting error of the urologists and the robot was 9.0 and 1.0 mm, respectively. Robotic assistance significantly decreased repeat biopsy errors with improved accuracy and precision. The mean significant prostate cancer detection rate of the urologists and the robot was 36% and 43%, respectively (p <0.0001).
Systematic biopsy with freehand transrectal ultrasound guidance does not closely follow the sextant schema and may result in suboptimal sampling and cancer detection. Repeat freehand biopsy of the same target is challenging. Robotic assistance with optimized biopsy schemas can potentially improve targeting, precision and accuracy. A clinical trial is needed to confirm the additional benefits of robotic assistance.
经直肠超声引导下前列腺活检结果依赖于医生根据活检方案靶向前列腺的能力。然而,据我们所知,尚不清楚徒手经直肠超声引导下活检针芯在前列腺中的定位精度,以及活检针芯的几何分布如何影响前列腺癌的检出率。
为了确定针芯的几何分布,我们开发了一种具有骨盆模拟体和光学跟踪系统的活检模拟系统。模拟体由 5 名泌尿科医生和我们的经直肠超声机器人以徒手方式进行活检,该机器人可以支撑和移动经直肠超声探头。我们比较了 1)靶向误差,2)重复活检的准确性和精密度,以及 3)使用基于概率的模型估计的显著前列腺癌(0.5cm³或更大)检出率。
泌尿科医生以簇状模式进行活检,对前列腺的很大一部分进行了欠采样。机器人严格遵循预定的活检方案。泌尿科医生和机器人的平均靶向误差分别为 9.0mm 和 1.0mm。机器人辅助显著降低了重复活检的误差,提高了准确性和精密度。泌尿科医生和机器人的显著前列腺癌检出率分别为 36%和 43%(p<0.0001)。
徒手经直肠超声引导的系统活检不能严格遵循六分区方案,可能导致采样不足和癌症检出率降低。对同一目标进行重复徒手活检具有挑战性。具有优化活检方案的机器人辅助可能有助于提高靶向性、精密度和准确性。需要进行临床试验以确认机器人辅助的额外益处。