Department of Brain Science and Engineering, Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology , Kitakyushu, Fukuoka 808-0196 , Japan.
Biol Open. 2012 Nov 15;1(11):1094-101. doi: 10.1242/bio.20121693. Epub 2012 Aug 29.
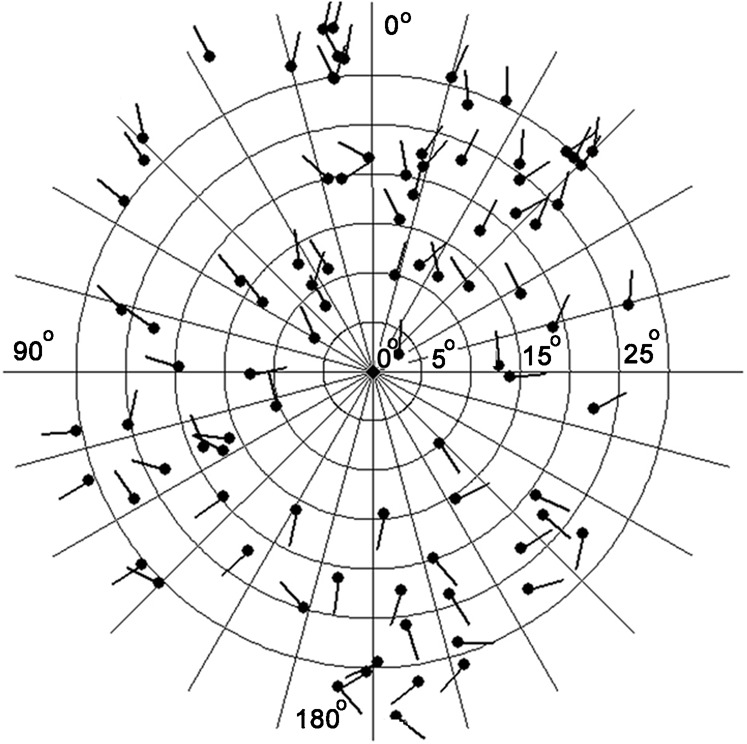
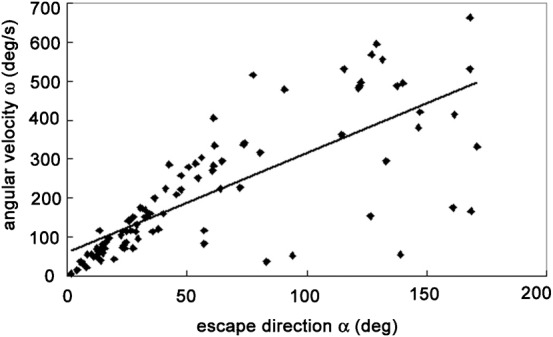
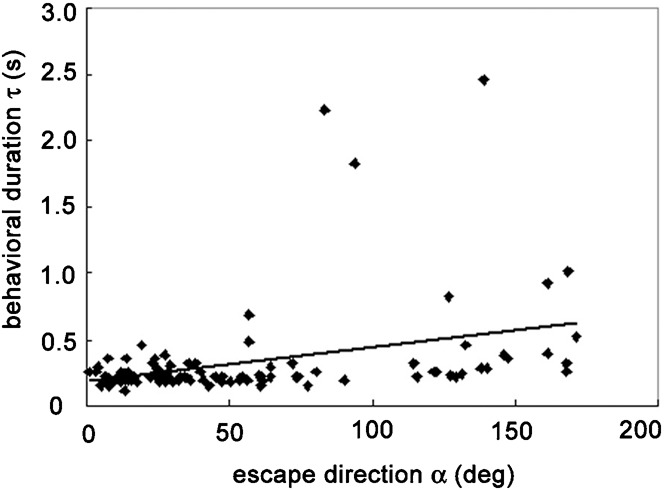
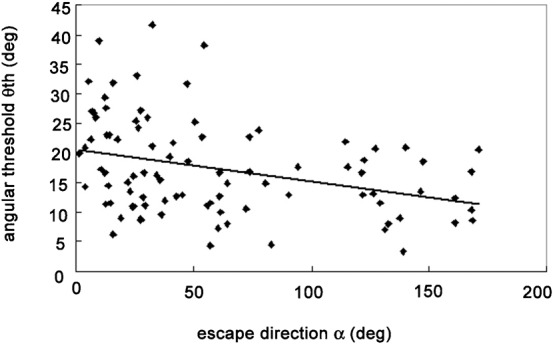
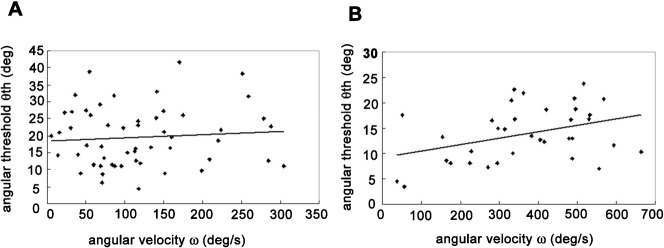
In this study, we examined the collision avoidance behavior of the frog, Rana catesbeiana to an approaching object in the upper visual field. The angular velocity of the frog's escape turn showed a significant positive correlation with the turn angle (r(2) = 0.5741, P<0.05). A similar mechanism of velocity control has been known in head movements of the owl and in human saccades. By analogy, this suggests that the frog planned its escape velocity in advance of executing the turn, to make the duration of the escape behavior relatively constant. For escape turns less than 60°, the positive correlation was very strong (r(2) = 0.7097, P<0.05). Thus, the frog controlled the angular velocity of small escape turns very accurately and completed the behavior within a constant time. On the other hand, for escape turns greater than 60°, the same correlation was not significant (r(2) = 0.065, P>0.05). Thus, the frog was not able to control the velocity of the large escape turns accurately and did not complete the behavior within a constant time. In the latter case, there was a small but significant positive correlation between the threshold angular size and the angular velocity (r(2) = 0.1459, P<0.05). This suggests that the threshold is controlled to compensate for the insufficient escape velocity achieved during large turn angles, and could explain a significant negative correlation between the turn angle and the threshold angular size (r(2) = 0.1145, P<0.05). Thus, it is likely that the threshold angular size is also controlled by the turn angle and is modulated by motor planning.
在这项研究中,我们研究了青蛙,牛蛙,对来自上视野中接近物体的避碰行为。青蛙的逃避转弯角速度与转弯角度呈显著正相关(r(2) = 0.5741,P < 0.05)。在猫头鹰的头部运动和人类的扫视中已经知道了类似的速度控制机制。类比表明,青蛙在执行转弯之前就预先规划了其逃避速度,以使逃避行为的持续时间相对恒定。对于小于 60°的逃避转弯,正相关性非常强(r(2) = 0.7097,P < 0.05)。因此,青蛙非常精确地控制了小逃避转弯的角速度,并在恒定的时间内完成了行为。另一方面,对于大于 60°的逃避转弯,相同的相关性不显著(r(2) = 0.065,P > 0.05)。因此,青蛙无法精确地控制大逃避转弯的速度,并且无法在恒定的时间内完成行为。在后一种情况下,阈值角度大小和角速度之间存在微小但显著的正相关(r(2) = 0.1459,P < 0.05)。这表明阈值受到控制,以补偿在大转弯角度期间实现的不足的逃避速度,并可以解释转弯角度和阈值角度大小之间的显著负相关(r(2) = 0.1145,P < 0.05)。因此,很可能阈值角度大小也受到转弯角度的控制,并通过运动规划进行调节。