Department of Mechanical, Nuclear and Production Engineering, University of Pisa, Largo Lucio Lazzarino, n.1, 56126 Pisa, Italy.
Sensors (Basel). 2012 Dec 6;12(12):16785-801. doi: 10.3390/s121216785.
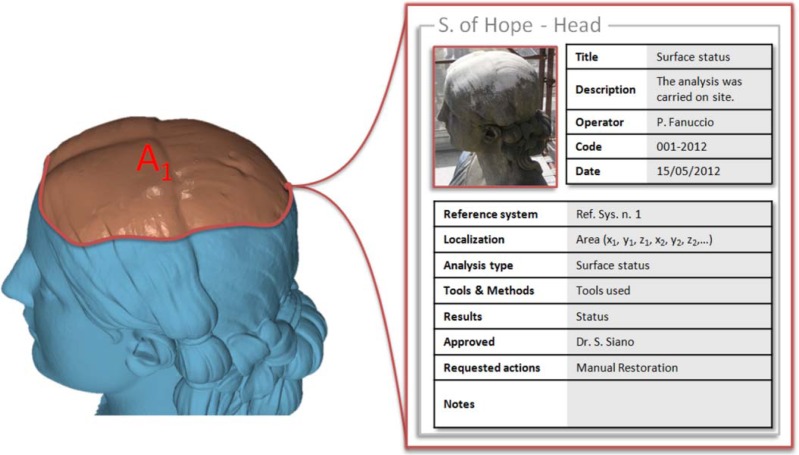
Nowadays, optical sensors are used to digitize sculptural artworks by exploiting various contactless technologies. Cultural Heritage applications may concern 3D reconstructions of sculptural shapes distinguished by small details distributed over large surfaces. These applications require robust multi-view procedures based on aligning several high resolution 3D measurements. In this paper, the integration of a 3D structured light scanner and a stereo photogrammetric sensor is proposed with the aim of reliably reconstructing large free form artworks. The structured light scanner provides high resolution range maps captured from different views. The stereo photogrammetric sensor measures the spatial location of each view by tracking a marker frame integral to the optical scanner. This procedure allows the computation of the rotation-translation matrix to transpose the range maps from local view coordinate systems to a unique global reference system defined by the stereo photogrammetric sensor. The artwork reconstructions can be further augmented by referring metadata related to restoration processes. In this paper, a methodology has been developed to map metadata to 3D models by capturing spatial references using a passive stereo-photogrammetric sensor. The multi-sensor framework has been experienced through the 3D reconstruction of a Statue of Hope located at the English Cemetery in Florence. This sculptural artwork has been a severe test due to the non-cooperative environment and the complex shape features distributed over a large surface.
如今,光学传感器被用于通过利用各种非接触技术对雕塑艺术品进行数字化。文化遗产应用可能涉及到通过对齐几个高分辨率的 3D 测量来可靠地重建具有分布在大表面上的小细节的雕塑形状的 3D 重建。本文提出了一种将 3D 结构光扫描仪和立体摄影测量传感器集成在一起的方法,目的是可靠地重建大型自由形状的艺术品。结构光扫描仪从不同的视角提供高分辨率的范围图。立体摄影测量传感器通过跟踪集成到光学扫描仪中的标记框架来测量每个视角的空间位置。该过程允许计算旋转-平移矩阵,将范围图从局部视角坐标系转换到由立体摄影测量传感器定义的唯一全局参考系。通过参考与修复过程相关的元数据,可以进一步增强艺术品的重建。在本文中,开发了一种使用被动立体摄影测量传感器捕获空间参考来将元数据映射到 3D 模型的方法。通过在佛罗伦萨的英国公墓的希望雕像的 3D 重建,体验了多传感器框架。由于非合作环境和分布在大表面上的复杂形状特征,这个雕塑艺术品是一个严峻的挑战。