Department of Navigation and Positioning, Finnish Geodetic Institute, Masala, Finland.
Sensors (Basel). 2013 Jan 24;13(2):1402-24. doi: 10.3390/s130201402.
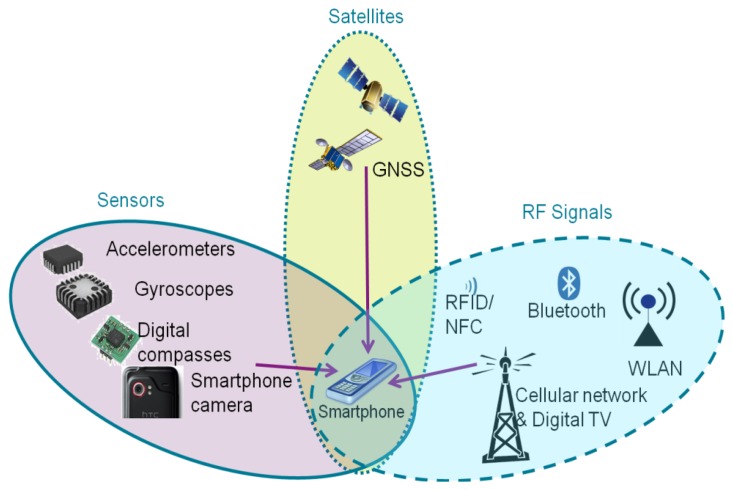
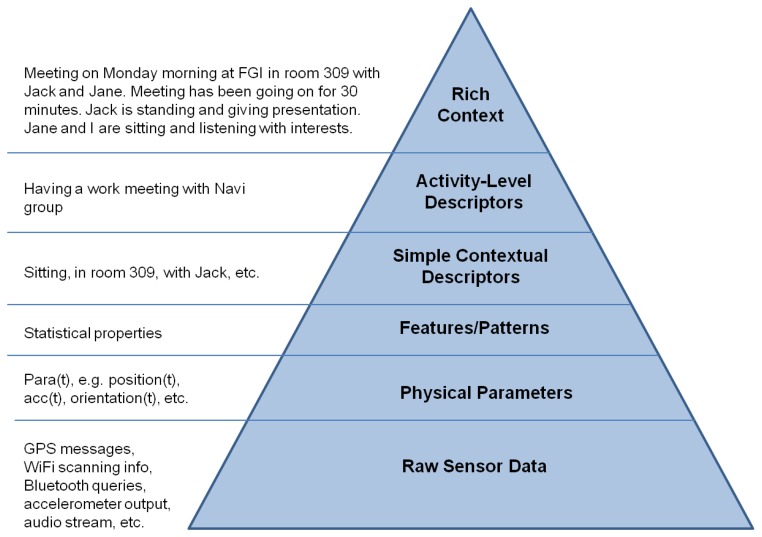
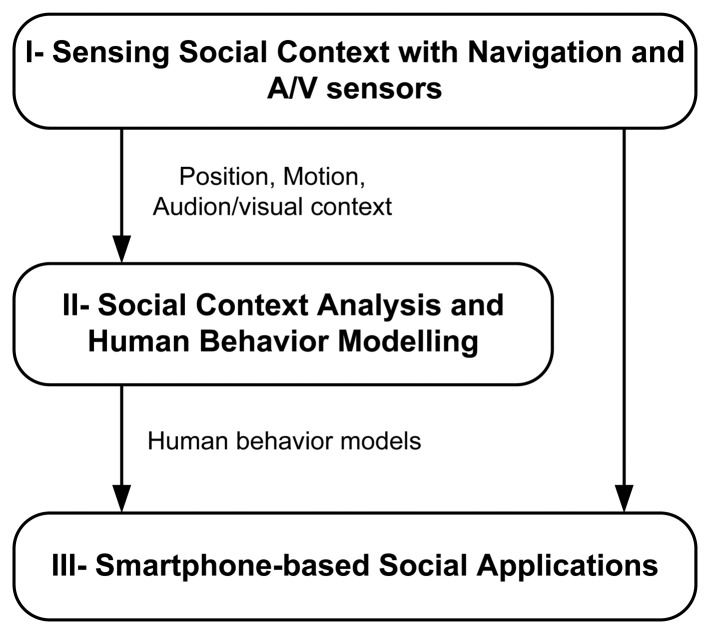
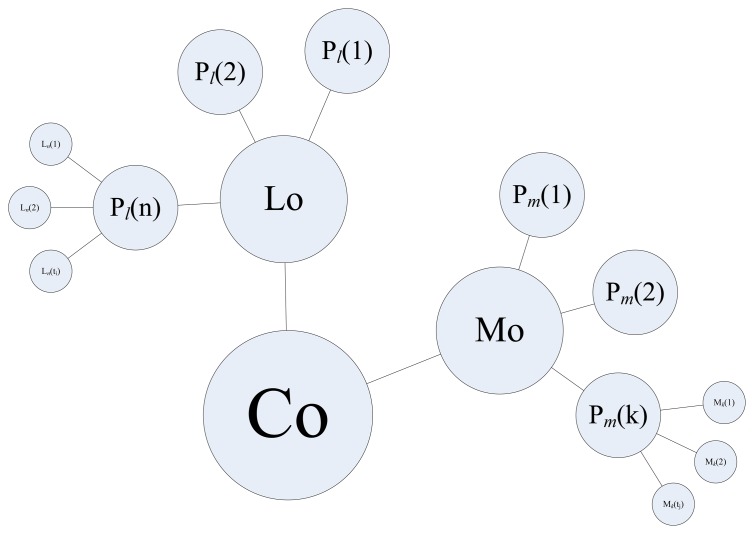
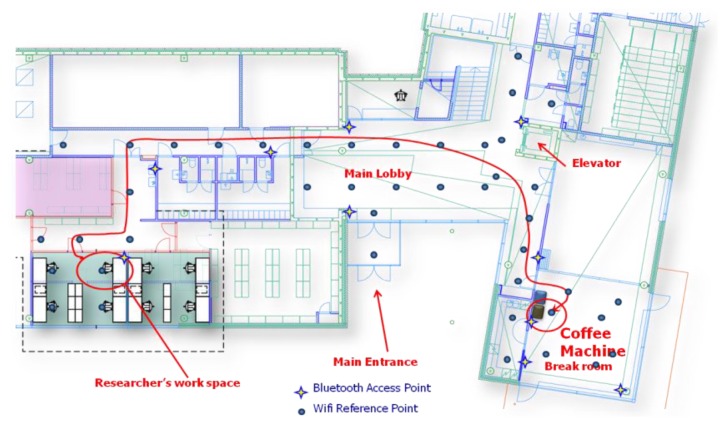
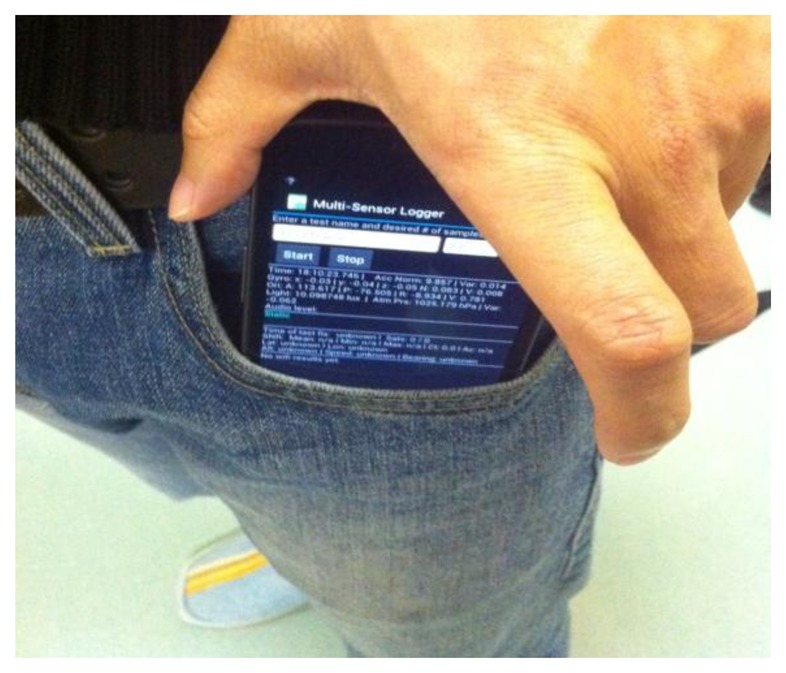
This research focuses on sensing context, modeling human behavior and developing a new architecture for a cognitive phone platform. We combine the latest positioning technologies and phone sensors to capture human movements in natural environments and use the movements to study human behavior. Contexts in this research are abstracted as a Context Pyramid which includes six levels: Raw Sensor Data, Physical Parameter, Features/Patterns, Simple Contextual Descriptors, Activity-Level Descriptors, and Rich Context. To achieve implementation of the Context Pyramid on a cognitive phone, three key technologies are utilized: ubiquitous positioning, motion recognition, and human behavior modeling. Preliminary tests indicate that we have successfully achieved the Activity-Level Descriptors level with our LoMoCo (Location-Motion-Context) model. Location accuracy of the proposed solution is up to 1.9 meters in corridor environments and 3.5 meters in open spaces. Test results also indicate that the motion states are recognized with an accuracy rate up to 92.9% using a Least Square-Support Vector Machine (LS-SVM) classifier.
本研究专注于感知情境、建模人类行为以及为认知型电话平台开发新架构。我们结合最新的定位技术和电话传感器,在自然环境中捕捉人类运动,并利用运动来研究人类行为。本研究中的情境被抽象为一个情境金字塔,包括六个层次:原始传感器数据、物理参数、特征/模式、简单情境描述符、活动级别描述符和丰富情境。为了在认知型电话上实现情境金字塔,我们利用了三种关键技术:无处不在的定位、运动识别和人类行为建模。初步测试表明,我们已成功利用我们的 LoMoCo(位置-运动-情境)模型实现了活动级别描述符这一层级。所提出解决方案的定位精度在走廊环境中高达 1.9 米,在开放空间中高达 3.5 米。测试结果还表明,使用最小二乘支持向量机(LS-SVM)分类器,运动状态的识别准确率高达 92.9%。