Neural Circuits and Behavior Group, Department of Biomedical Optics, Max Planck Institute for Medical Research Heidelberg, Germany.
Front Neural Circuits. 2013 May 10;7:86. doi: 10.3389/fncir.2013.00086. eCollection 2013.
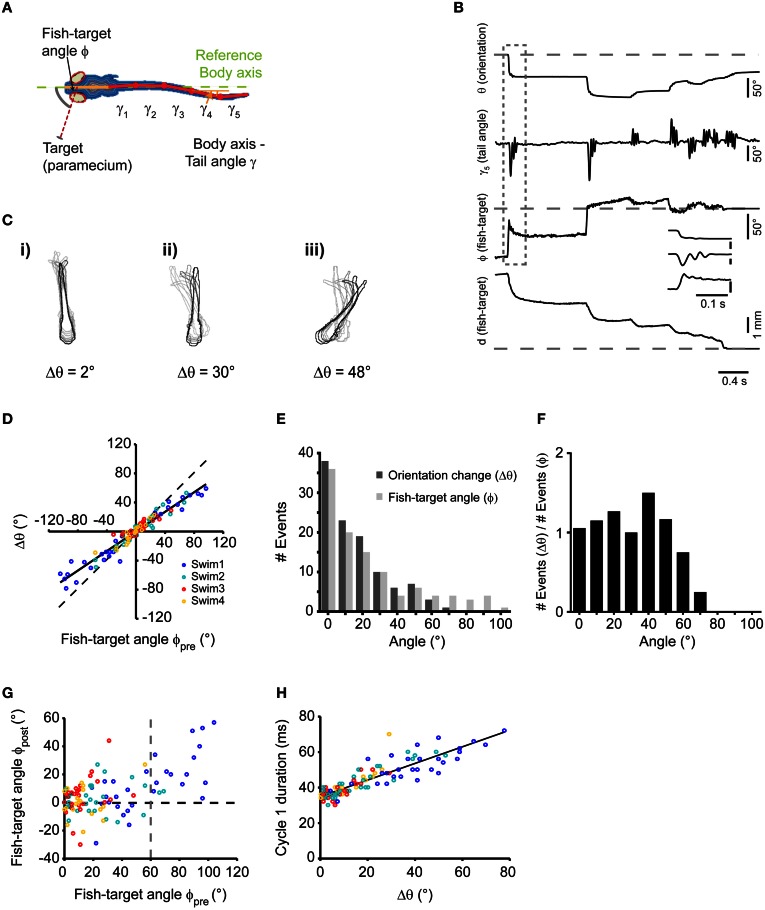
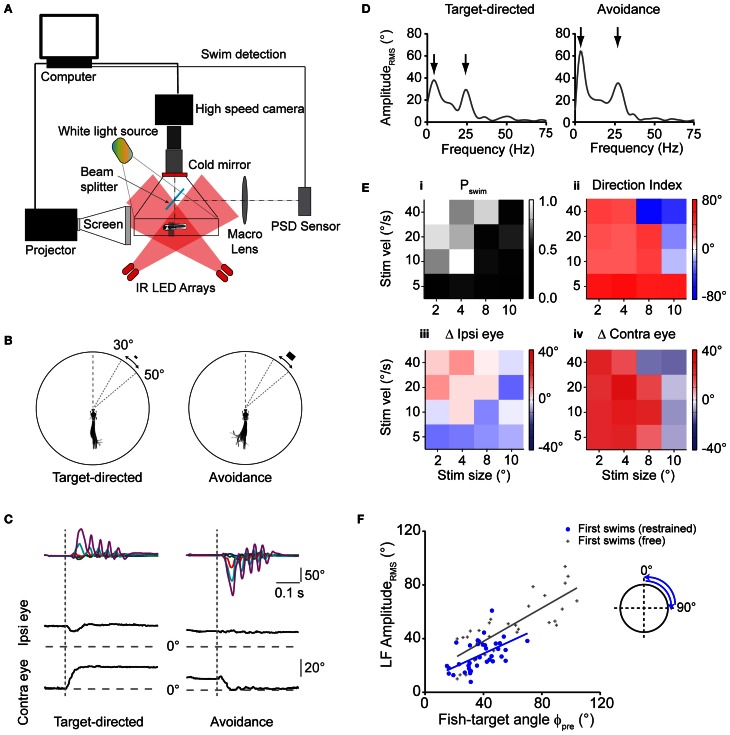
Prey capture behavior critically depends on rapid processing of sensory input in order to track, approach, and catch the target. When using vision, the nervous system faces the problem of extracting relevant information from a continuous stream of input in order to detect and categorize visible objects as potential prey and to select appropriate motor patterns for approach. For prey capture, many vertebrates exhibit intermittent locomotion, in which discrete motor patterns are chained into a sequence, interrupted by short periods of rest. Here, using high-speed recordings of full-length prey capture sequences performed by freely swimming zebrafish larvae in the presence of a single paramecium, we provide a detailed kinematic analysis of first and subsequent swim bouts during prey capture. Using Fourier analysis, we show that individual swim bouts represent an elementary motor pattern. Changes in orientation are directed toward the target on a graded scale and are implemented by an asymmetric tail bend component superimposed on this basic motor pattern. To further investigate the role of visual feedback on the efficiency and speed of this complex behavior, we developed a closed-loop virtual reality setup in which minimally restrained larvae recapitulated interconnected swim patterns closely resembling those observed during prey capture in freely moving fish. Systematic variation of stimulus properties showed that prey capture is initiated within a narrow range of stimulus size and velocity. Furthermore, variations in the delay and location of swim triggered visual feedback showed that the reaction time of secondary and later swims is shorter for stimuli that appear within a narrow spatio-temporal window following a swim. This suggests that the larva may generate an expectation of stimulus position, which enables accelerated motor sequencing if the expectation is met by appropriate visual feedback.
猎物捕获行为严重依赖于对感官输入的快速处理,以便跟踪、接近并捕获目标。当使用视觉时,神经系统面临从连续输入流中提取相关信息的问题,以便检测和分类可见物体作为潜在猎物,并选择适合接近的运动模式。对于猎物捕获,许多脊椎动物表现出间歇性运动,其中离散的运动模式被链接成一个序列,中间穿插着短暂的休息期。在这里,我们使用高速记录自由游泳的斑马鱼幼虫在单个草履虫存在下进行的全长猎物捕获序列,对猎物捕获过程中的第一次和随后的游泳进行了详细的运动学分析。使用傅里叶分析,我们表明单个游泳是一个基本的运动模式。方向的变化是在分级尺度上指向目标的,并通过叠加在这个基本运动模式上的不对称尾部弯曲组件来实现。为了进一步研究视觉反馈对这种复杂行为的效率和速度的作用,我们开发了一个闭环虚拟现实设置,在这个设置中,受最小限制的幼虫再现了相互连接的游泳模式,这些模式与自由游动鱼类在猎物捕获过程中观察到的模式非常相似。对刺激特性的系统变化表明,猎物捕获是在一个狭窄的刺激大小和速度范围内开始的。此外,游泳触发视觉反馈的延迟和位置的变化表明,对于在游泳后一个狭窄的时空窗口内出现的刺激,二次和后续游泳的反应时间更短。这表明幼虫可能会产生对刺激位置的期望,如果期望得到适当的视觉反馈的满足,就可以加速运动序列。