Department of Biomedical Engineering, University of California, Irvine, CA 92697, USA.
J Neuroeng Rehabil. 2013 Jul 17;10:77. doi: 10.1186/1743-0003-10-77.
Spinal cord injury (SCI) can leave the affected individuals with paraparesis or paraplegia, thus rendering them unable to ambulate. Since there are currently no restorative treatments for this population, novel approaches such as brain-controlled prostheses have been sought. Our recent studies show that a brain-computer interface (BCI) can be used to control ambulation within a virtual reality environment (VRE), suggesting that a BCI-controlled lower extremity prosthesis for ambulation may be feasible. However, the operability of our BCI has not yet been tested in a SCI population.
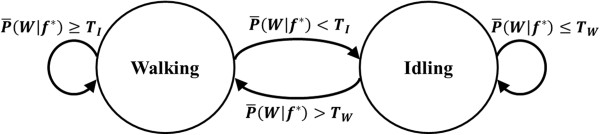
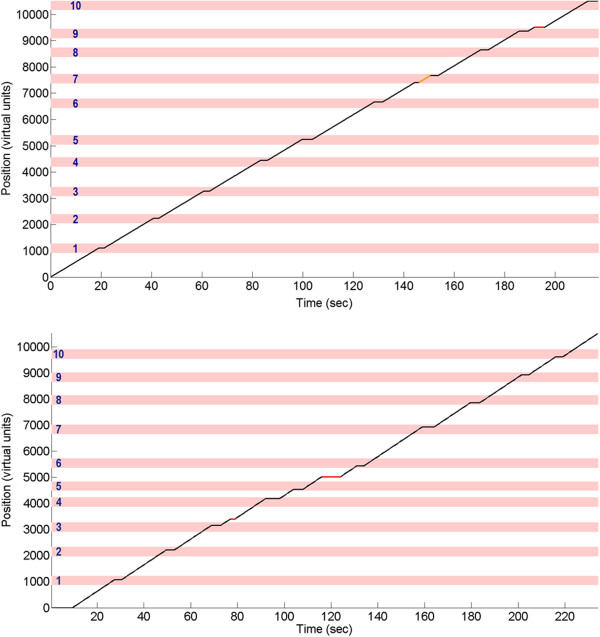
Five participants with paraplegia or tetraplegia due to SCI underwent a 10-min training session in which they alternated between kinesthetic motor imagery (KMI) of idling and walking while their electroencephalogram (EEG) were recorded. Participants then performed a goal-oriented online task, where they utilized KMI to control the linear ambulation of an avatar while making 10 sequential stops at designated points within the VRE. Multiple online trials were performed in a single day, and this procedure was repeated across 5 experimental days.
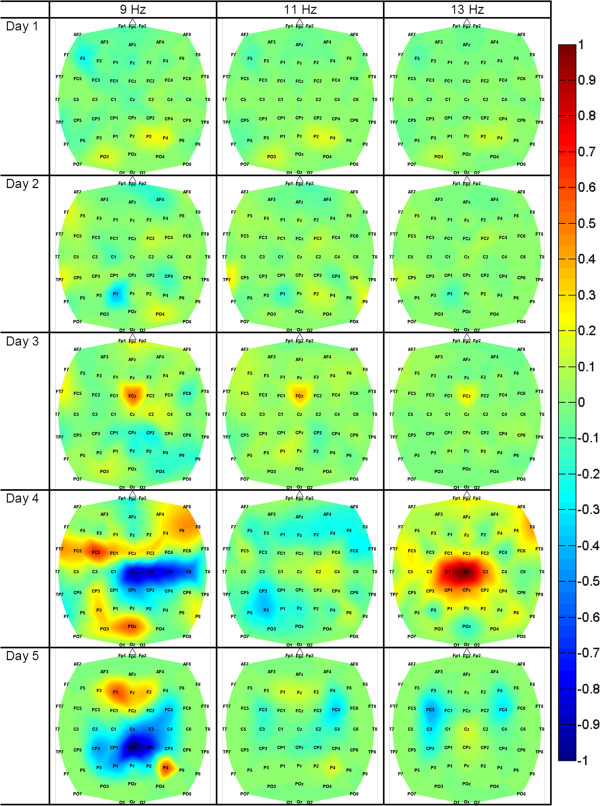
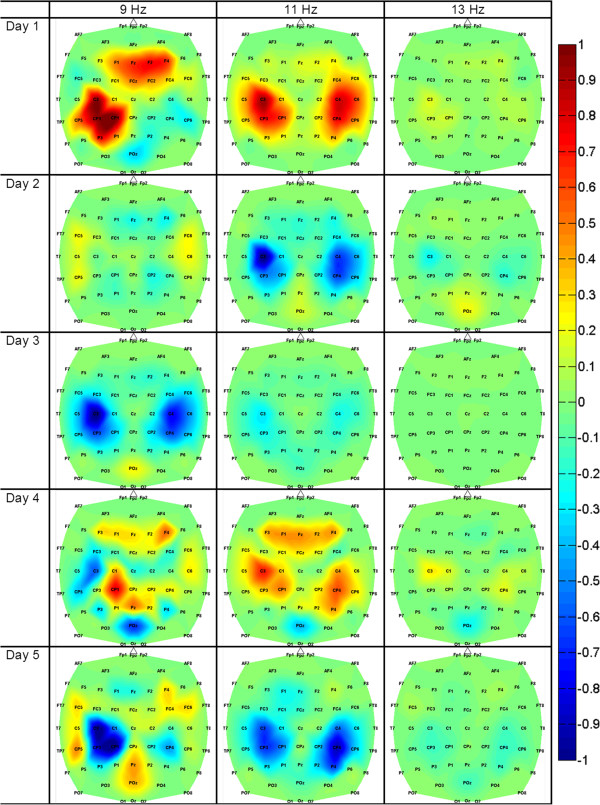
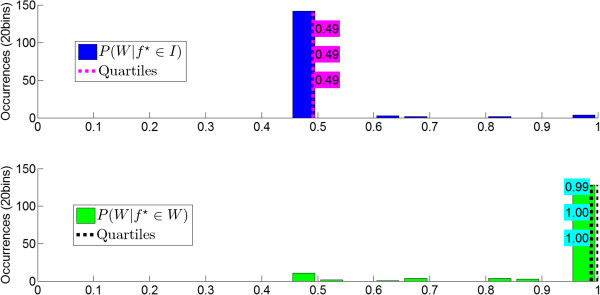
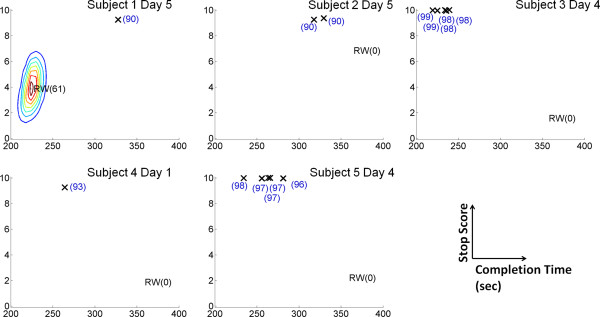
Classification accuracy of idling and walking was estimated offline and ranged from 60.5% (p = 0.0176) to 92.3% (p = 1.36×10-20) across participants and days. Offline analysis revealed that the activation of mid-frontal areas mostly in the μ and low β bands was the most consistent feature for differentiating between idling and walking KMI. In the online task, participants achieved an average performance of 7.4±2.3 successful stops in 273±51 sec. These performances were purposeful, i.e. significantly different from the random walk Monte Carlo simulations (p<0.01), and all but one participant achieved purposeful control within the first day of the experiments. Finally, all participants were able to maintain purposeful control throughout the study, and their online performances improved over time.
The results of this study demonstrate that SCI participants can purposefully operate a self-paced BCI walking simulator to complete a goal-oriented ambulation task. The operation of the proposed BCI system requires short training, is intuitive, and robust against participant-to-participant and day-to-day neurophysiological variations. These findings indicate that BCI-controlled lower extremity prostheses for gait rehabilitation or restoration after SCI may be feasible in the future.
脊髓损伤(SCI)会导致受影响的个体出现截瘫或四肢瘫痪,从而无法行走。由于目前对此类人群尚无恢复性治疗方法,因此人们一直在寻求新的方法,例如脑控假肢。我们最近的研究表明,脑-机接口(BCI)可用于控制虚拟现实环境(VRE)中的步行,这表明用于行走的 BCI 控制下肢假肢可能是可行的。但是,我们的 BCI 的操作性尚未在 SCI 人群中进行测试。
五名因 SCI 导致截瘫或四肢瘫痪的参与者参加了 10 分钟的培训课程,在此期间,他们在记录脑电图(EEG)的同时交替进行静息和行走的运动想象(KMI)。然后,参与者执行一个目标导向的在线任务,他们利用 KMI 控制虚拟环境(VRE)中指定点之间的 10 个连续的停顿,从而控制虚拟化身的线性步行。在一天内进行多次在线试验,然后在 5 个实验日中重复该过程。
离线估计的静息和行走分类准确率在参与者和天数之间的范围为 60.5%(p=0.0176)至 92.3%(p=1.36×10-20)。离线分析表明,中前额区域的激活主要在μ和低β频段,这是区分静息和行走 KMI 的最一致特征。在在线任务中,参与者在 273±51 秒内平均完成了 7.4±2.3 次成功停顿。这些表现是有目的的,即与随机游走蒙特卡罗模拟(p<0.01)有明显区别,并且除一名参与者外,所有参与者都在实验的第一天就实现了有目的的控制。最后,所有参与者都能够在整个研究过程中保持有目的的控制,并且他们的在线表现随着时间的推移而提高。
这项研究的结果表明,SCI 参与者可以有目的地操作自主 paced BCI 步行模拟器来完成有目标的步行任务。所提出的 BCI 系统的操作需要进行简短的培训,直观,并且对参与者之间和每天之间的神经生理变化具有鲁棒性。这些发现表明,用于 SCI 后步态康复或恢复的 BCI 控制下肢假肢可能在未来是可行的。