Frankfurt Institute for Advanced Studies, Goethe University Frankfurt am Main, Germany.
Front Neurorobot. 2013 Nov 7;7:20. doi: 10.3389/fnbot.2013.00020. eCollection 2013.
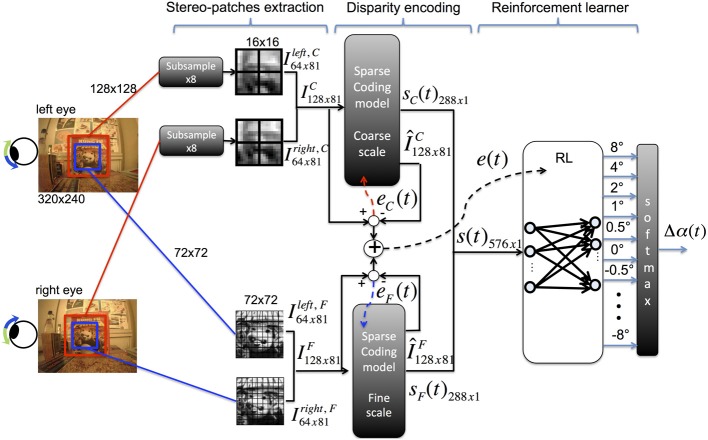
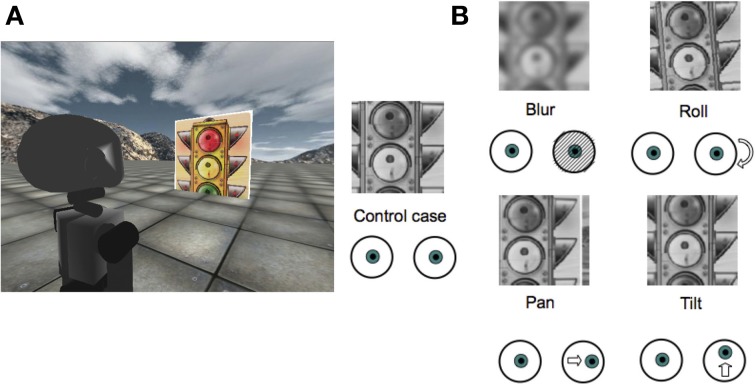
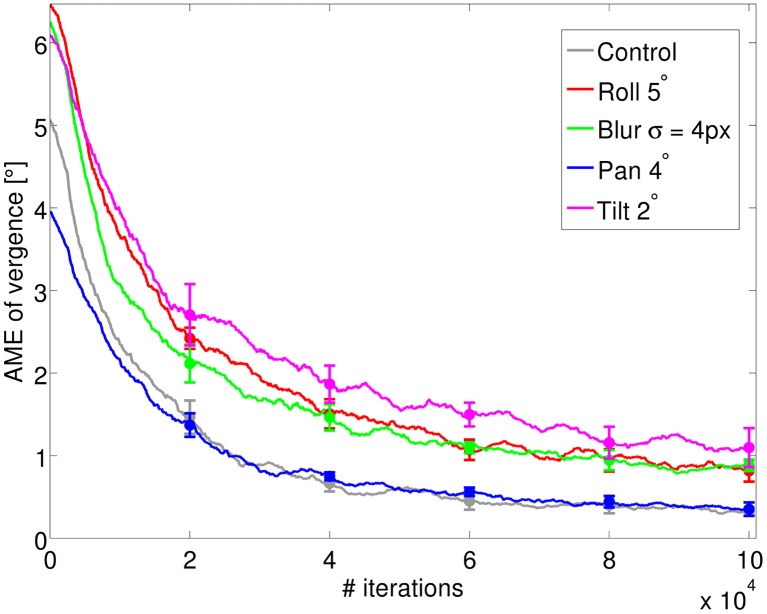
The efficient coding hypothesis posits that sensory systems of animals strive to encode sensory signals efficiently by taking into account the redundancies in them. This principle has been very successful in explaining response properties of visual sensory neurons as adaptations to the statistics of natural images. Recently, we have begun to extend the efficient coding hypothesis to active perception through a form of intrinsically motivated learning: a sensory model learns an efficient code for the sensory signals while a reinforcement learner generates movements of the sense organs to improve the encoding of the signals. To this end, it receives an intrinsically generated reinforcement signal indicating how well the sensory model encodes the data. This approach has been tested in the context of binocular vison, leading to the autonomous development of disparity tuning and vergence control. Here we systematically investigate the robustness of the new approach in the context of a binocular vision system implemented on a robot. Robustness is an important aspect that reflects the ability of the system to deal with unmodeled disturbances or events, such as insults to the system that displace the stereo cameras. To demonstrate the robustness of our method and its ability to self-calibrate, we introduce various perturbations and test if and how the system recovers from them. We find that (1) the system can fully recover from a perturbation that can be compensated through the system's motor degrees of freedom, (2) performance degrades gracefully if the system cannot use its motor degrees of freedom to compensate for the perturbation, and (3) recovery from a perturbation is improved if both the sensory encoding and the behavior policy can adapt to the perturbation. Overall, this work demonstrates that our intrinsically motivated learning approach for efficient coding in active perception gives rise to a self-calibrating perceptual system of high robustness.
高效编码假说认为,动物的感觉系统通过考虑信号中的冗余来努力有效地编码感觉信号。这一原则在解释视觉感觉神经元的反应特性方面非常成功,这些特性被认为是对自然图像统计规律的适应。最近,我们开始通过一种内在动机学习的形式将高效编码假说扩展到主动感知:感觉模型学习对感觉信号进行高效编码,而强化学习者则产生感觉器官的运动,以改善信号的编码。为此,它接收一个内在产生的强化信号,指示感觉模型对数据的编码效果如何。这种方法已经在双目视觉的背景下进行了测试,导致了视差调谐和聚散控制的自主发展。在这里,我们系统地研究了这种新方法在机器人上实现的双目视觉系统中的鲁棒性。鲁棒性是一个重要的方面,它反映了系统处理未建模的干扰或事件的能力,例如对立体摄像机造成位移的系统干扰。为了证明我们的方法的鲁棒性及其自校准能力,我们引入了各种干扰,并测试系统是否以及如何从中恢复。我们发现:(1)系统可以从可以通过系统的运动自由度补偿的干扰中完全恢复;(2)如果系统不能使用其运动自由度来补偿干扰,那么性能会优雅地降级;(3)如果感觉编码和行为策略都可以适应干扰,那么从干扰中恢复的效果会得到改善。总的来说,这项工作表明,我们用于主动感知中的高效编码的内在动机学习方法产生了一种具有高度鲁棒性的自校准感知系统。