Marshall Christopher D, Wieskotten Sven, Hanke Wolf, Hanke Frederike D, Marsh Alyssa, Kot Brian, Dehnhardt Guido
Department of Marine Biology, Texas A&M University, Galveston, Texas, United States of America ; Department of Wildlife and Fisheries Sciences, Texas A&M University, College Station, Texas, United States of America.
Institute for Biosciences, Sensory and Cognitive Ecology Group, University of Rostock, Rostock, Germany.
PLoS One. 2014 Jan 24;9(1):e86710. doi: 10.1371/journal.pone.0086710. eCollection 2014.
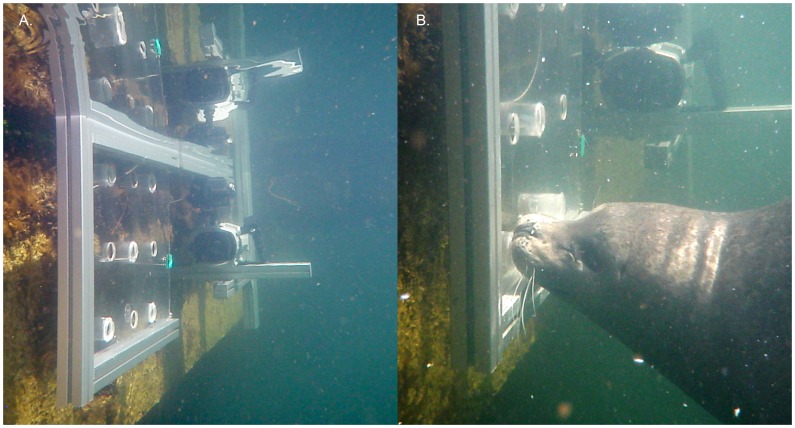
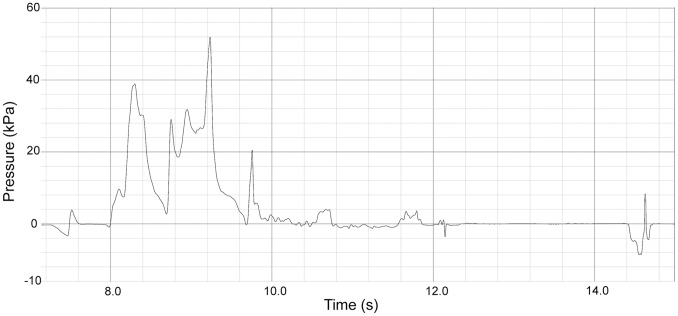
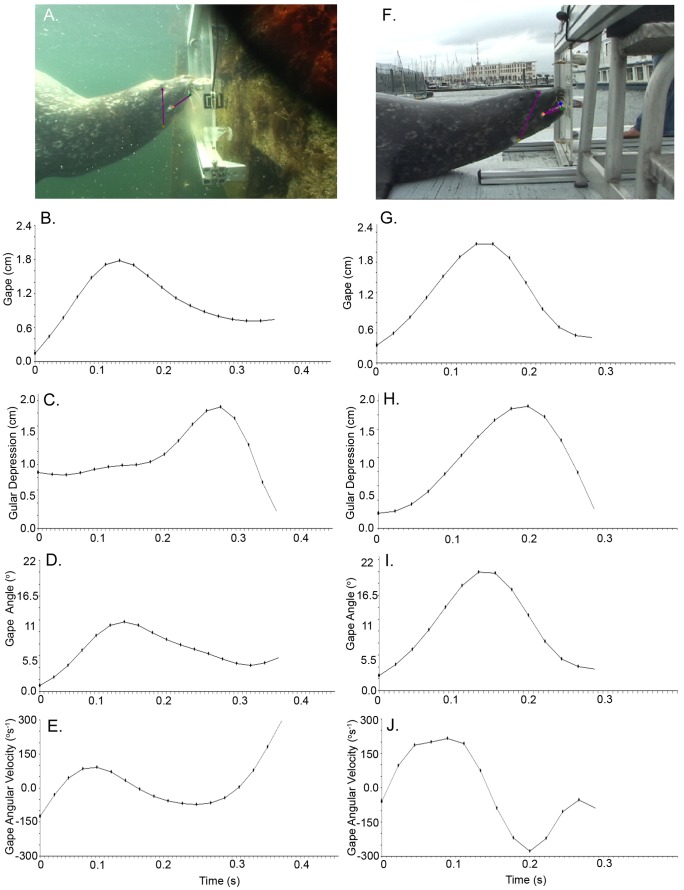
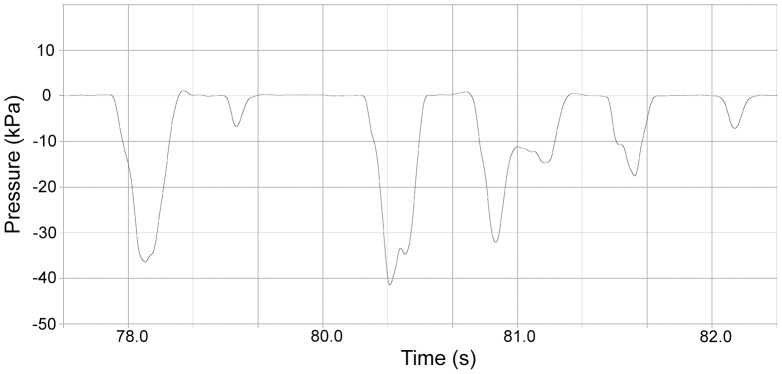
The feeding kinematics, suction and hydraulic jetting capabilities of captive harbor seals (Phoca vitulina) were characterized during controlled feeding trials. Feeding trials were conducted using a feeding apparatus that allowed a choice between biting and suction, but also presented food that could be ingested only by suction. Subambient pressure exerted during suction feeding behaviors was directly measured using pressure transducers. The mean feeding cycle duration for suction-feeding events was significantly shorter (0.15±0.09 s; P<0.01) than biting feeding events (0.18±0.08 s). Subjects feeding in-water used both a suction and a biting feeding mode. Suction was the favored feeding mode (84% of all feeding events) compared to biting, but biting comprised 16% of feeding events. In addition, seals occasionally alternated suction with hydraulic jetting, or used hydraulic jetting independently, to remove fish from the apparatus. Suction and biting feeding modes were kinematically distinct regardless of feeding location (in-water vs. on-land). Suction was characterized by a significantly smaller gape (1.3±0.23 cm; P<0.001) and gape angle (12.9±2.02°), pursing of the rostral lips to form a circular aperture, and pursing of the lateral lips to occlude lateral gape. Biting was characterized by a large gape (3.63±0.21 cm) and gape angle (28.8±1.80°; P<0.001) and lip curling to expose teeth. The maximum subambient pressure recorded was 48.8 kPa. In addition, harbor seals were able to jet water at food items using suprambient pressure, also known as hydraulic jetting. The maximum hydraulic jetting force recorded was 53.9 kPa. Suction and hydraulic jetting where employed 90.5% and 9.5%, respectively, during underwater feeding events. Harbor seals displayed a wide repertoire of behaviorally flexible feeding strategies to ingest fish from the feeding apparatus. Such flexibility of feeding strategies and biomechanics likely forms the basis of their opportunistic, generalized feeding ecology and concomitant breadth of diet.
在受控喂食试验中,对圈养斑海豹(Phoca vitulina)的摄食运动学、吸食和水力喷射能力进行了表征。使用一种喂食装置进行喂食试验,该装置允许在咬食和吸食之间进行选择,但也提供了只能通过吸食摄入的食物。使用压力传感器直接测量吸食喂食行为期间施加的低于环境压力。吸食喂食事件的平均喂食周期持续时间(0.15±0.09秒;P<0.01)明显短于咬食喂食事件(0.18±0.08秒)。在水中进食的受试者同时使用了吸食和咬食两种喂食模式。与咬食相比,吸食是更受青睐的喂食模式(占所有喂食事件的84%),但咬食占喂食事件的16%。此外,海豹偶尔会交替使用吸食和水力喷射,或单独使用水力喷射,以将鱼从装置中取出。无论喂食地点(水中与陆上)如何,吸食和咬食喂食模式在运动学上都有明显差异。吸食的特点是口裂明显较小(1.3±0.23厘米;P<0.001)和口角(12.9±2.02°),吻部嘴唇收缩形成圆形开口,外侧嘴唇收缩以闭合外侧口裂。咬食的特点是口裂较大(3.63±0.21厘米)和口角(28.8±1.80°;P<0.001),嘴唇卷曲以露出牙齿。记录到的最大低于环境压力为48.8千帕。此外,斑海豹能够利用高于环境压力向食物喷射水,也称为水力喷射。记录到的最大水力喷射力为53.9千帕。在水下喂食事件中,吸食和水力喷射的使用比例分别为90.5%和9.5%。斑海豹展示了一系列行为灵活的喂食策略,以便从喂食装置中摄取鱼类。这种喂食策略和生物力学的灵活性可能构成了它们机会主义、广义摄食生态以及随之而来的广泛饮食范围的基础。