Dipartimento di Ingegneria dell'Informazione, Università Politecnica delle Marche, Via Brecce Bianche 12, Ancona 60131, Italy.
Sensors (Basel). 2014 Feb 11;14(2):2756-75. doi: 10.3390/s140202756.
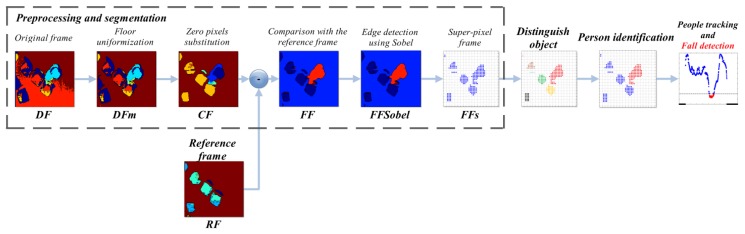
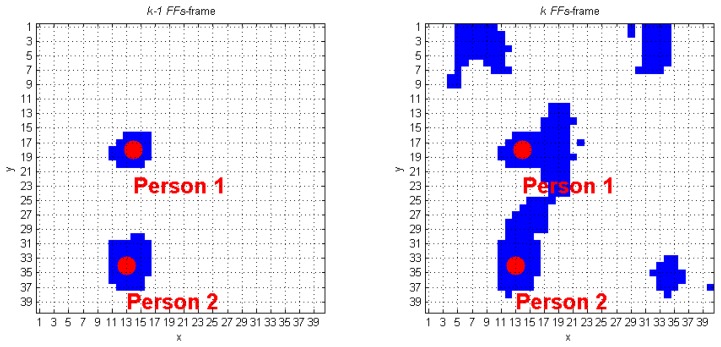
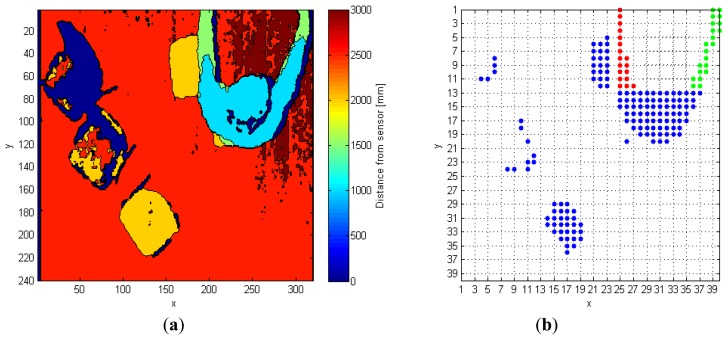
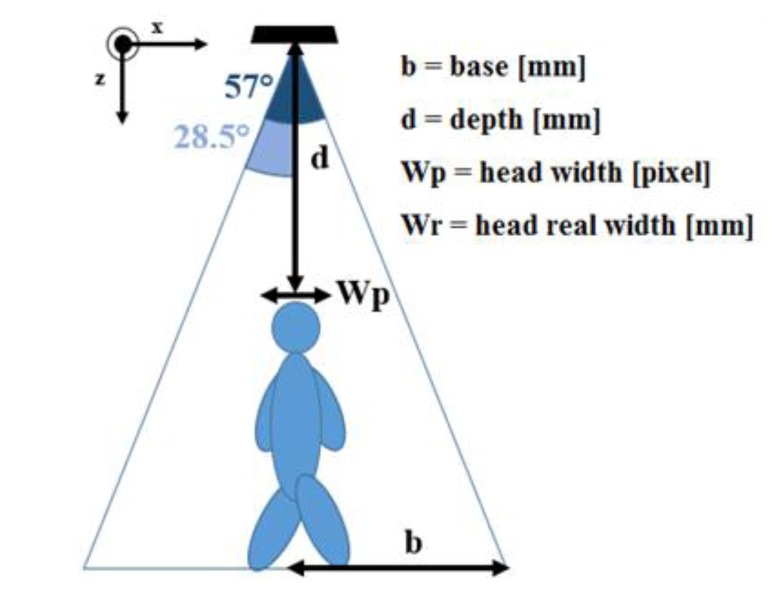
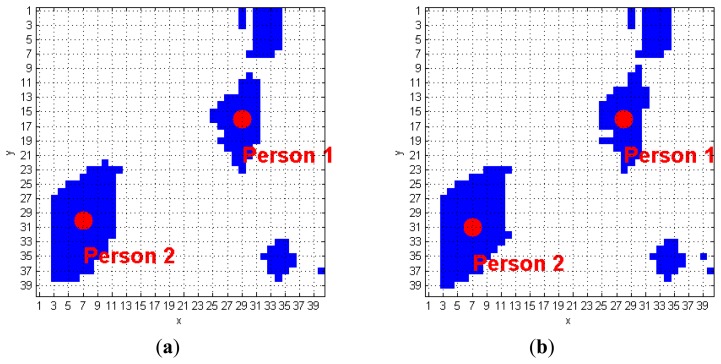
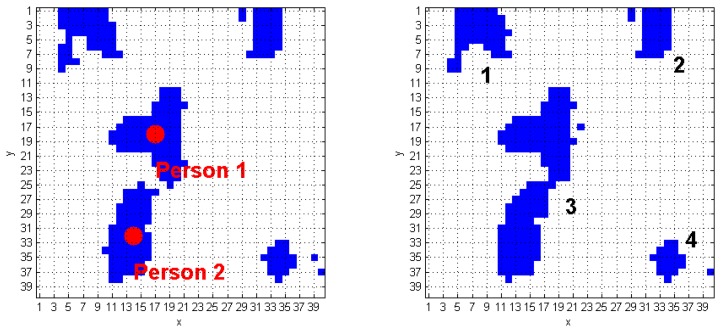
We propose an automatic, privacy-preserving, fall detection method for indoor environments, based on the usage of the Microsoft Kinect® depth sensor, in an "on-ceiling" configuration, and on the analysis of depth frames. All the elements captured in the depth scene are recognized by means of an Ad-Hoc segmentation algorithm, which analyzes the raw depth data directly provided by the sensor. The system extracts the elements, and implements a solution to classify all the blobs in the scene. Anthropometric relationships and features are exploited to recognize one or more human subjects among the blobs. Once a person is detected, he is followed by a tracking algorithm between different frames. The use of a reference depth frame, containing the set-up of the scene, allows one to extract a human subject, even when he/she is interacting with other objects, such as chairs or desks. In addition, the problem of blob fusion is taken into account and efficiently solved through an inter-frame processing algorithm. A fall is detected if the depth blob associated to a person is near to the floor. Experimental tests show the effectiveness of the proposed solution, even in complex scenarios.
我们提出了一种基于 Microsoft Kinect®深度传感器的自动、隐私保护、室内环境下的跌倒检测方法,该方法采用“天花板”配置,并对深度帧进行分析。通过一种特定于用途的分割算法,对深度场景中捕获的所有元素进行识别,该算法直接分析传感器提供的原始深度数据。系统提取元素,并实现一种解决方案,对场景中的所有斑点进行分类。利用人体测量学关系和特征来识别斑点中的一个或多个人体对象。一旦检测到一个人,就会在不同的帧之间使用跟踪算法对其进行跟踪。使用包含场景设置的参考深度帧,可以提取一个人体对象,即使他/她正在与其他对象(如椅子或桌子)进行交互。此外,还考虑到了斑点融合的问题,并通过帧间处理算法有效地解决了该问题。如果与人体相关的深度斑点接近地面,则会检测到跌倒。实验测试表明,即使在复杂的场景中,该解决方案也是有效的。