Müller Corsin A, Riemer Stefanie, Virányi Zsófia, Huber Ludwig, Range Friederike
Messerli Research Institute, University of Veterinary Medicine Vienna, Medical University of Vienna, University of Vienna, Veterinärplatz 1, 1210, Vienna, Austria,
Anim Cogn. 2014 Sep;17(5):1071-80. doi: 10.1007/s10071-014-0739-y. Epub 2014 Mar 4.
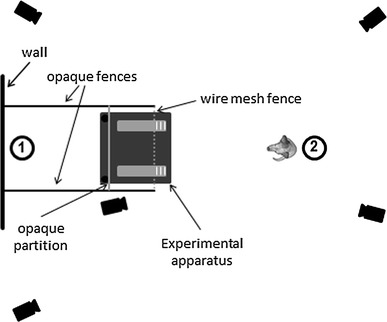
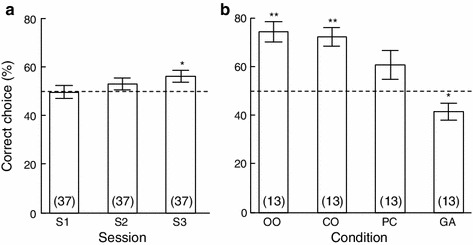
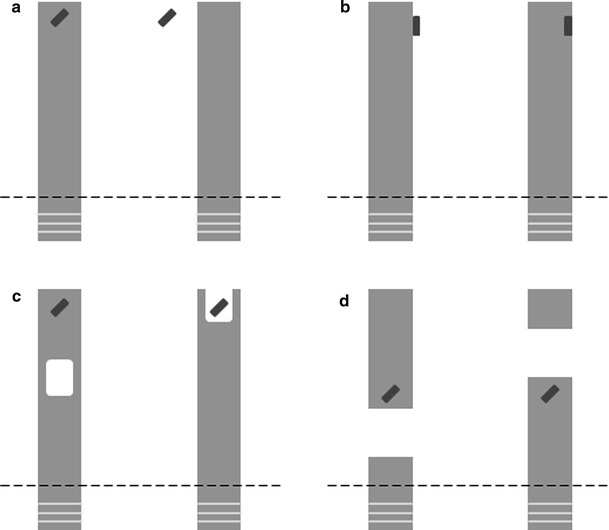
Numerous recent studies have investigated how animals solve means-end tasks and unraveled considerable variation in strategies used by different species. Domestic dogs (Canis familiaris) have typically performed comparably poorly in physical cognition tasks, but a recent study showed that they can solve the on-off condition of the support problem, where they are confronted with two boards, one with a reward placed on it and the other with a reward placed next to it. To explore which strategies dogs use to solve this task, we first tested 37 dogs with the on-off condition tested previously and then tested subjects that passed this condition with three transfer tasks. For the contact condition, the inaccessible reward was touching the second board. For the perceptual containment condition, the inaccessible reward was surrounded on three sides by the second board, but not supported by it, whereas for the gap condition, discontinuous boards were used. Unlike in the previous study, our subjects did not perform above chance level in the initial trials of the on-off condition, but 13 subjects learned to solve it. Their performance in the transfer tasks suggests that dogs can learn to solve the support problem based on perceptual cues, that they can quickly adopt new cues when old ones become unreliable, but also that some apparently inherent preferences are hard to overcome. Our study contributes to accumulating evidence demonstrating that animals typically rely on a variety of perceptual cues to solve physical cognition tasks, without developing an understanding of the underlying causal structure.
近期有大量研究探讨了动物如何解决手段-目的任务,并揭示了不同物种所采用策略的显著差异。家犬(Canis familiaris)在物理认知任务中的表现通常相对较差,但最近的一项研究表明,它们能够解决支撑问题的开关条件,即面对两块木板,一块上面放置着奖励,另一块旁边放置着奖励。为了探究狗使用哪些策略来解决这个任务,我们首先对37只狗进行了先前测试过的开关条件测试,然后对通过该条件的受试者进行了三项转移任务测试。对于接触条件,无法获取的奖励接触到第二块木板。对于感知容纳条件,无法获取的奖励在三边被第二块木板包围,但没有得到它的支撑,而对于间隙条件,则使用了不连续的木板。与先前的研究不同,我们的受试者在开关条件的初始试验中没有表现出高于随机水平,但有13只受试者学会了解决它。它们在转移任务中的表现表明,狗可以学会基于感知线索解决支撑问题,当旧线索变得不可靠时,它们可以迅速采用新线索,但也表明一些明显的固有偏好很难克服。我们的研究有助于积累证据,证明动物通常依靠各种感知线索来解决物理认知任务,而无需对潜在的因果结构形成理解。