Wood Nathan A, Schwartzman David, Zenati Marco A, Riviere Cameron N
The Robotics Institute, Carnegie Mellon University, Pittsburgh, Pennsylvania 15213.
Division of Cardiology, University of Pittsburgh, Pittsburgh, Pennsylvania 15213.
Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2012 Dec 31;2012:6290716. doi: 10.1109/BioRob.2012.6290716.
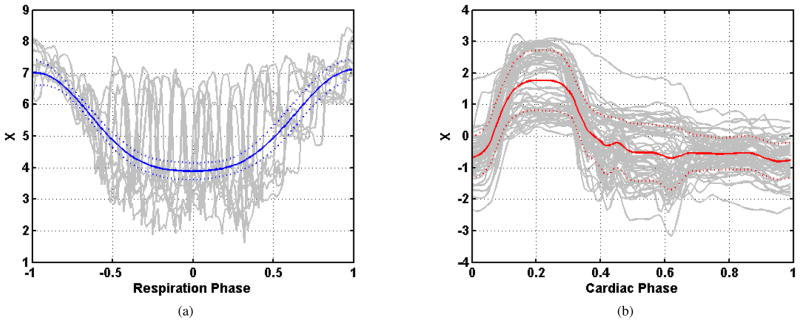
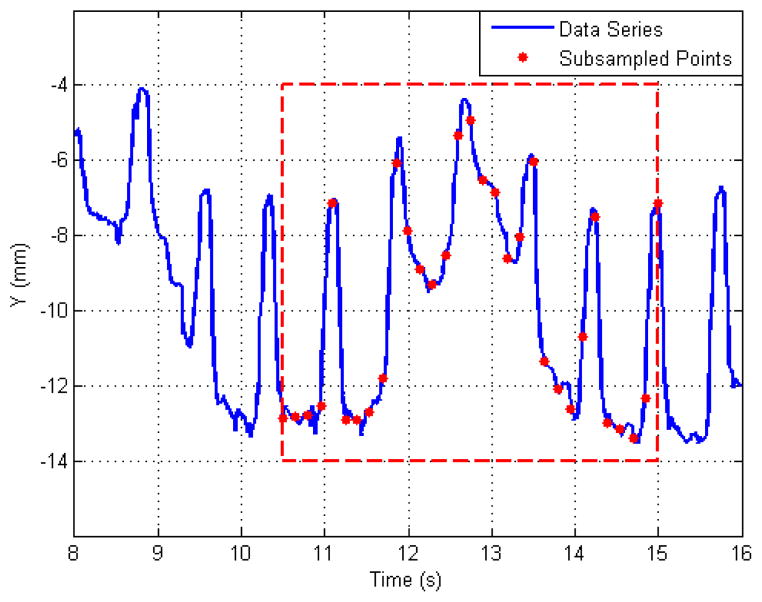
HeartLander is a miniature mobile robot which adheres to and crawls over the surface of the beating heart to provide therapies in a minimally invasive manner. Although HeartLander inherently provides a stable operating platform, the motion of the surface of the heart remains an important factor in the operation of the robot. The quasi-periodic motion of the heart due to physiological cycles, respiration and the heartbeat, affects the ability of the robot to move, as well as localize accurately. In order to improve locomotion efficiency, as well as register different locations on the heart in physiological phase, two methods of identifying physiological phases are presented: sliding-window-based and model-based. In the sliding-window-based approach a vector of previous measurements is compared to previously learned motion templates to determine the current physiological phases, while the model-based approach learns a Fourier series model of the motion, and uses this model to estimate the current physiological phases using an Extended Kalman Filter (EKF). The two methods, while differing in approach, produce similarly accurate results on data recorded from animal experiments .
“心脏着陆者”是一种微型移动机器人,它能够附着在跳动的心脏表面并在上面爬行,以微创方式提供治疗。尽管“心脏着陆者”本身提供了一个稳定的操作平台,但心脏表面的运动仍然是机器人操作中的一个重要因素。由于生理周期、呼吸和心跳导致的心脏准周期性运动,会影响机器人移动以及精确定位的能力。为了提高运动效率,并在生理阶段对心脏上的不同位置进行配准,本文提出了两种识别生理阶段的方法:基于滑动窗口的方法和基于模型的方法。在基于滑动窗口的方法中,将先前测量的向量与先前学习的运动模板进行比较,以确定当前的生理阶段,而基于模型的方法则学习运动的傅里叶级数模型,并使用该模型通过扩展卡尔曼滤波器(EKF)来估计当前的生理阶段。这两种方法虽然在方法上有所不同,但在动物实验记录的数据上产生的结果同样准确。