Department of Engineering Cybernetics, Norwegian University of Science and Technology, Trondheim, Norway.
J Neuroeng Rehabil. 2014 Apr 28;11:75. doi: 10.1186/1743-0003-11-75.
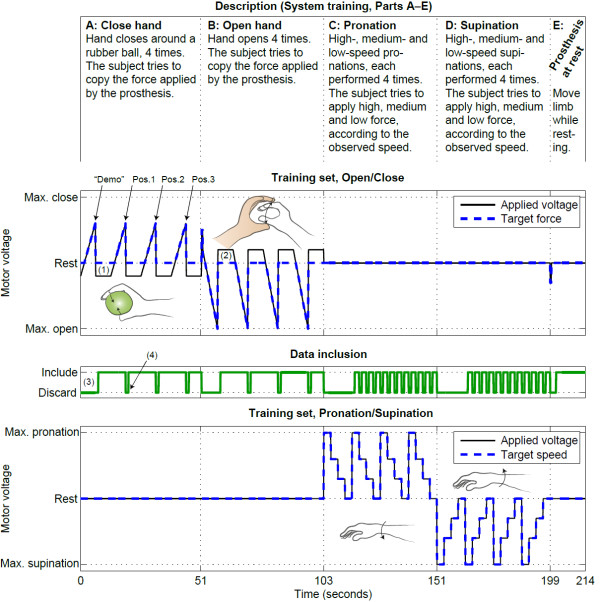
Pattern recognition control of prosthetic hands take inputs from one or more myoelectric sensors and controls one or more degrees of freedom. However, most systems created allow only sequential control of one motion class at a time. Additionally, only recently have researchers demonstrated proportional myoelectric control in such systems, an option that is believed to make fine control easier for the user. Recent developments suggest improved reliability if the user follows a so-called prosthesis guided training (PGT) scheme.
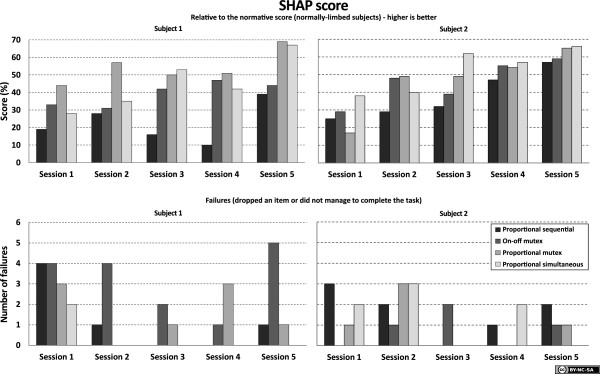
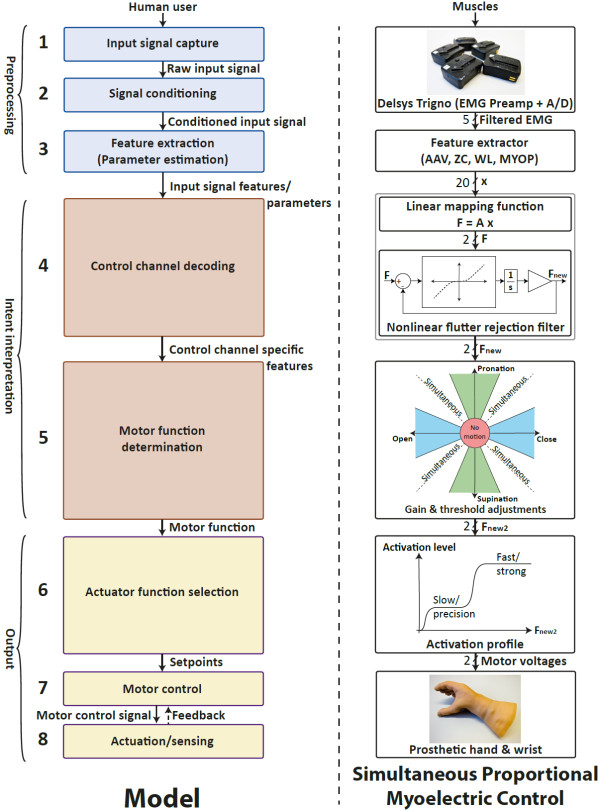
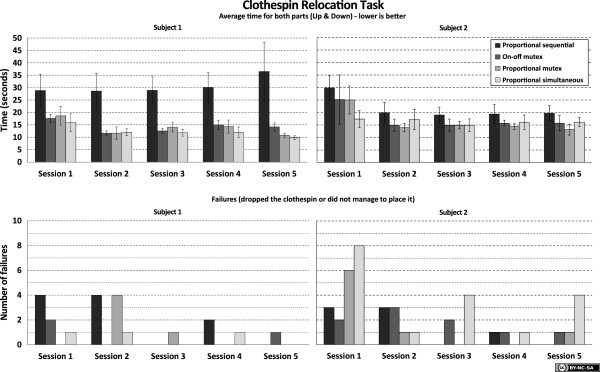
In this study, a system for simultaneous proportional myoelectric control has been developed for a hand prosthesis with two motor functions (hand open/close, and wrist pro-/supination). The prosthesis has been used with a prosthesis socket equivalent designed for normally-limbed subjects. An extended version of PGT was developed for use with proportional control. The control system's performance was tested for two subjects in the Clothespin Relocation Task and the Southampton Hand Assessment Procedure (SHAP). Simultaneous proportional control was compared with three other control strategies implemented on the same prosthesis: mutex proportional control (the same system but with simultaneous control disabled), mutex on-off control, and a more traditional, sequential proportional control system with co-contractions for state switching.
The practical tests indicate that the simultaneous proportional control strategy and the two mutex-based pattern recognition strategies performed equally well, and superiorly to the more traditional sequential strategy according to the chosen outcome measures.
This is the first simultaneous proportional myoelectric control system demonstrated on a prosthesis affixed to the forearm of a subject. The study illustrates that PGT is a promising system training method for proportional control. Due to the limited number of subjects in this study, no definite conclusions can be drawn.
假肢手的模式识别控制从一个或多个肌电传感器获取输入,并控制一个或多个自由度。然而,大多数创建的系统只允许一次顺序控制一个运动类别。此外,最近研究人员才在这些系统中展示了比例肌电控制,这种选择被认为使用户更容易进行精细控制。如果用户遵循所谓的假体引导训练(PGT)方案,最近的发展表明可靠性会提高。
在这项研究中,为具有两个运动功能(手张开/闭合和手腕内旋/外旋)的手假体开发了一种用于同时进行比例肌电控制的系统。该假体与为正常肢体受试者设计的假体插座一起使用。为比例控制开发了 PGT 的扩展版本。在 Clothespin 重新定位任务和南安普顿手评估程序(SHAP)中,对两个受试者测试了控制系统的性能。将同时比例控制与在同一假体上实现的其他三种控制策略进行了比较:互斥比例控制(相同系统但同时控制被禁用)、互斥开/关控制以及更传统的、具有状态切换共收缩的顺序比例控制系统。
实际测试表明,同时比例控制策略以及两种基于互斥的模式识别策略的性能同样出色,并且根据所选的结果测量标准,优于更传统的顺序策略。
这是第一个在附着在受试者前臂上的假体上展示的同时比例肌电控制系统。该研究表明,PGT 是一种很有前途的比例控制系统训练方法。由于本研究中受试者数量有限,因此无法得出明确的结论。