Department of Biomedical Engineering, University of Utah, Salt Lake City, UT, 84112, USA.
Center for Clinical and Translational Science, University of Utah, Salt Lake City, UT, 84112, USA.
J Neuroeng Rehabil. 2021 Feb 25;18(1):45. doi: 10.1186/s12984-021-00839-x.
Advanced prostheses can restore function and improve quality of life for individuals with amputations. Unfortunately, most commercial control strategies do not fully utilize the rich control information from residual nerves and musculature. Continuous decoders can provide more intuitive prosthesis control using multi-channel neural or electromyographic recordings. Three components influence continuous decoder performance: the data used to train the algorithm, the algorithm, and smoothing filters on the algorithm's output. Individual groups often focus on a single decoder, so very few studies compare different decoders using otherwise similar experimental conditions.
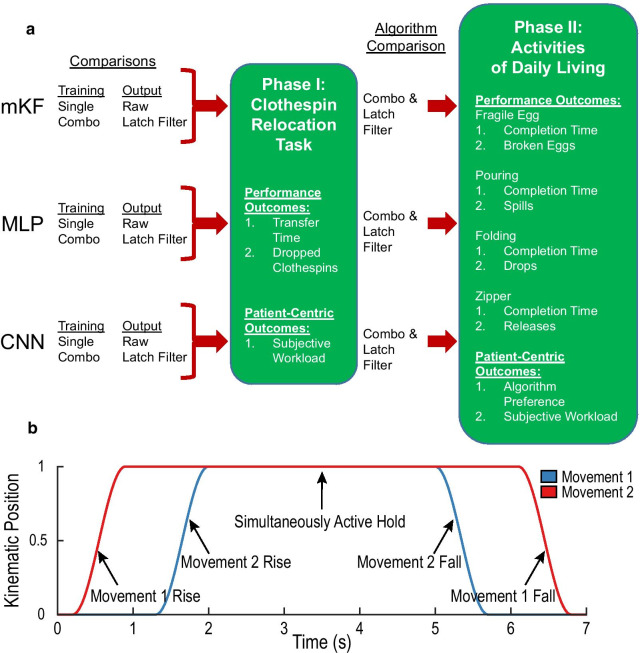
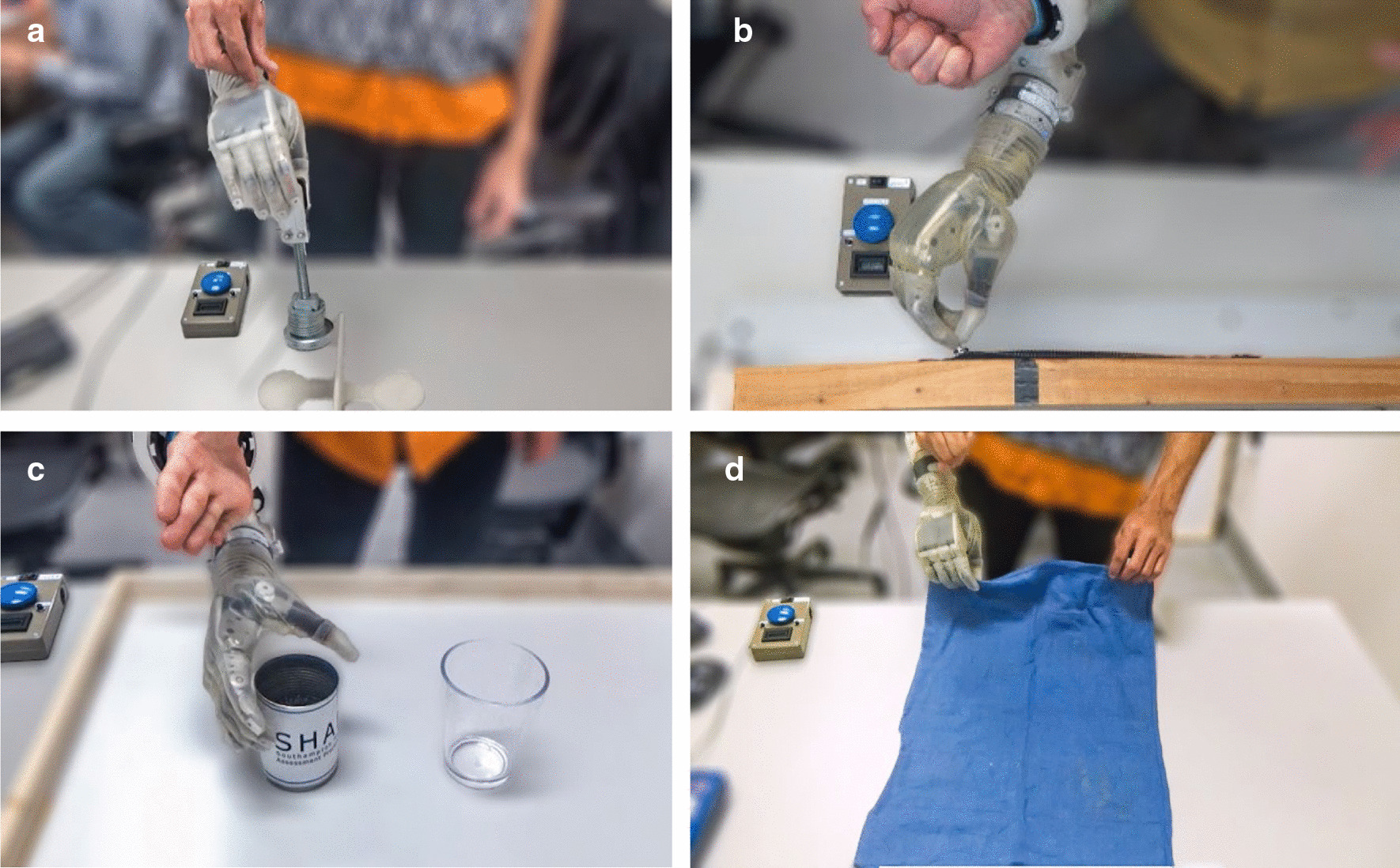
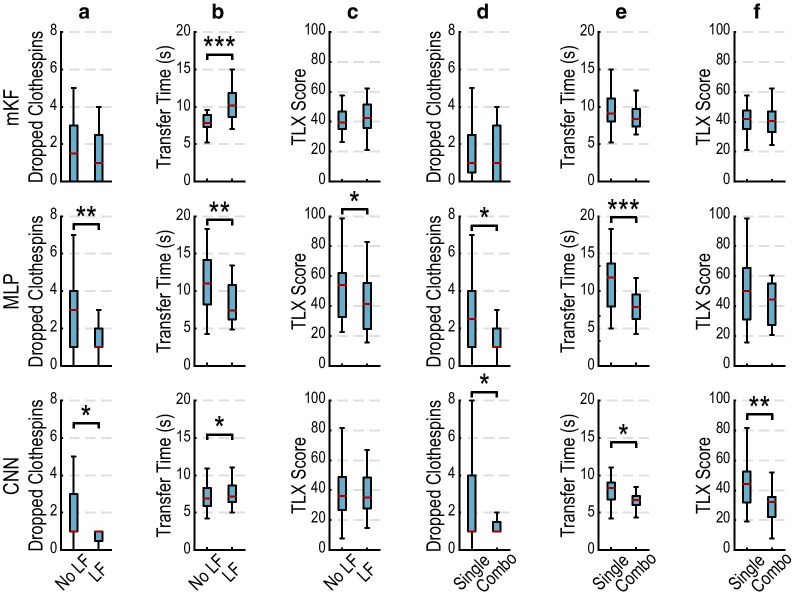
We completed a two-phase, head-to-head comparison of 12 continuous decoders using activities of daily living. In phase one, we compared two training types and a smoothing filter with three algorithms (modified Kalman filter, multi-layer perceptron, and convolutional neural network) in a clothespin relocation task. We compared training types that included only individual digit and wrist movements vs. combination movements (e.g., simultaneous grasp and wrist flexion). We also compared raw vs. nonlinearly smoothed algorithm outputs. In phase two, we compared the three algorithms in fragile egg, zipping, pouring, and folding tasks using the combination training and smoothing found beneficial in phase one. In both phases, we collected objective, performance-based (e.g., success rate), and subjective, user-focused (e.g., preference) measures.
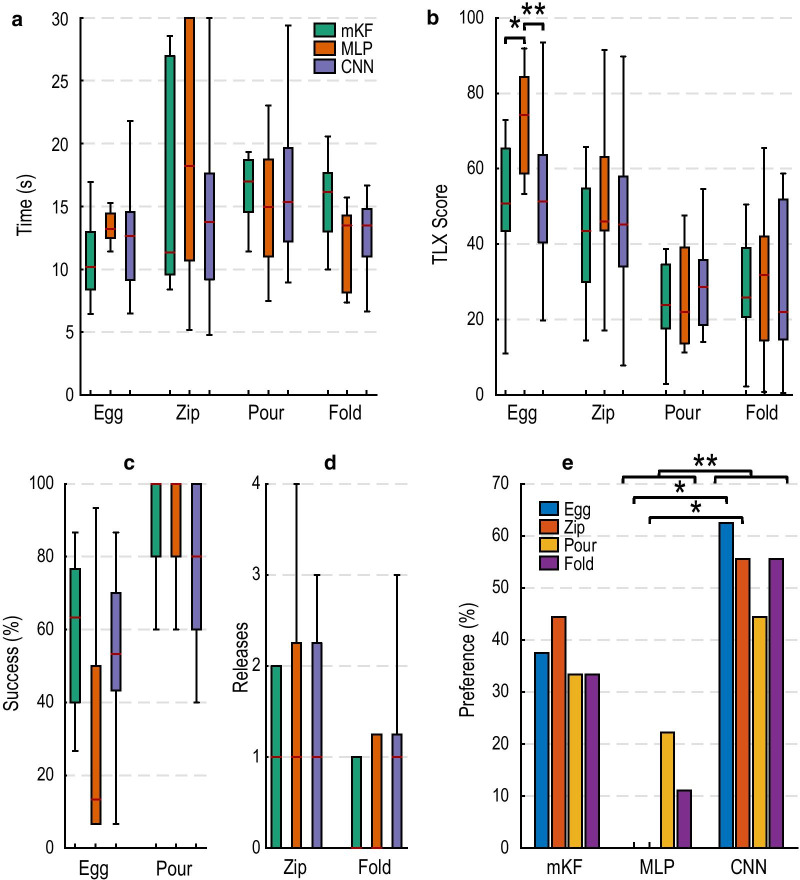
Phase one showed that combination training improved prosthesis control accuracy and speed, and that the nonlinear smoothing improved accuracy but generally reduced speed. Phase one importantly showed simultaneous movements were used in the task, and that the modified Kalman filter and multi-layer perceptron predicted more simultaneous movements than the convolutional neural network. In phase two, user-focused metrics favored the convolutional neural network and modified Kalman filter, whereas performance-based metrics were generally similar among all algorithms.
These results confirm that state-of-the-art algorithms, whether linear or nonlinear in nature, functionally benefit from training on more complex data and from output smoothing. These studies will be used to select a decoder for a long-term take-home trial with implanted neuromyoelectric devices. Overall, clinical considerations may favor the mKF as it is similar in performance, faster to train, and computationally less expensive than neural networks.
先进的假肢可以恢复截肢者的功能并提高生活质量。不幸的是,大多数商业控制策略并未充分利用残留神经和肌肉的丰富控制信息。连续解码器可以使用多通道神经或肌电图记录提供更直观的假肢控制。有三个因素会影响连续解码器的性能:用于训练算法的数据、算法以及算法输出上的平滑滤波器。各个小组通常专注于单个解码器,因此很少有研究使用类似的实验条件来比较不同的解码器。
我们使用日常生活活动完成了 12 个连续解码器的两阶段、头对头比较。在第一阶段,我们在夹钳重新定位任务中比较了两种训练类型和一种平滑滤波器与三种算法(改进的卡尔曼滤波器、多层感知器和卷积神经网络)。我们比较了仅包含单个数字和手腕运动的训练类型与组合运动(例如,同时抓握和手腕弯曲)。我们还比较了原始算法输出和非线性平滑算法输出。在第二阶段,我们在易碎鸡蛋、拉链、倾倒和折叠任务中比较了三种算法,使用在第一阶段发现有益的组合训练和平滑。在两个阶段中,我们都收集了客观的、基于性能的(例如,成功率)和主观的、以用户为中心的(例如,偏好)测量。
第一阶段表明,组合训练提高了假肢控制的准确性和速度,非线性平滑提高了准确性,但通常降低了速度。第一阶段重要地表明,任务中同时使用了运动,并且改进的卡尔曼滤波器和多层感知器预测了比卷积神经网络更多的同时运动。在第二阶段,以用户为中心的指标倾向于卷积神经网络和改进的卡尔曼滤波器,而基于性能的指标在所有算法之间通常相似。
这些结果证实,无论是线性还是非线性的最先进算法,从更复杂的数据训练和输出平滑中都可以获得功能上的益处。这些研究将用于选择植入神经肌电设备的长期带回家试验的解码器。总的来说,临床考虑可能偏向于 mKF,因为它在性能上相似,训练速度更快,并且比神经网络计算成本更低。