Ciocan Răzvan Alexandru, Graur Florin, Ciocan Andra, Cismaru Cosmin Andrei, Pintilie Sebastian Romeo, Berindan-Neagoe Ioana, Hajjar Nadim Al, Gherman Claudia Diana
Department of Surgery-Practical Abilities, "Iuliu Hațieganu" University of Medicine and Pharmacy Cluj-Napoca, Marinescu Street, No. 23, 400337 Cluj-Napoca, Romania.
Department of Surgery, "Iuliu Hațieganu" University of Medicine and Pharmacy Cluj-Napoca, Croitorilor Street, No. 19-21, 400162 Cluj-Napoca, Romania.
Diagnostics (Basel). 2023 Jul 24;13(14):2456. doi: 10.3390/diagnostics13142456.
The introduction of robotic-guided procedures in surgical techniques has brought an increase in the accuracy and control of resections. Surgery has evolved as a technique since the development of laparoscopy, which has added to the visualisation of the peritoneal cavity from a different perspective. Multi-armed robot associated with real-time intraoperative imaging devices brings important manoeuvrability and dexterity improvements in certain surgical fields.
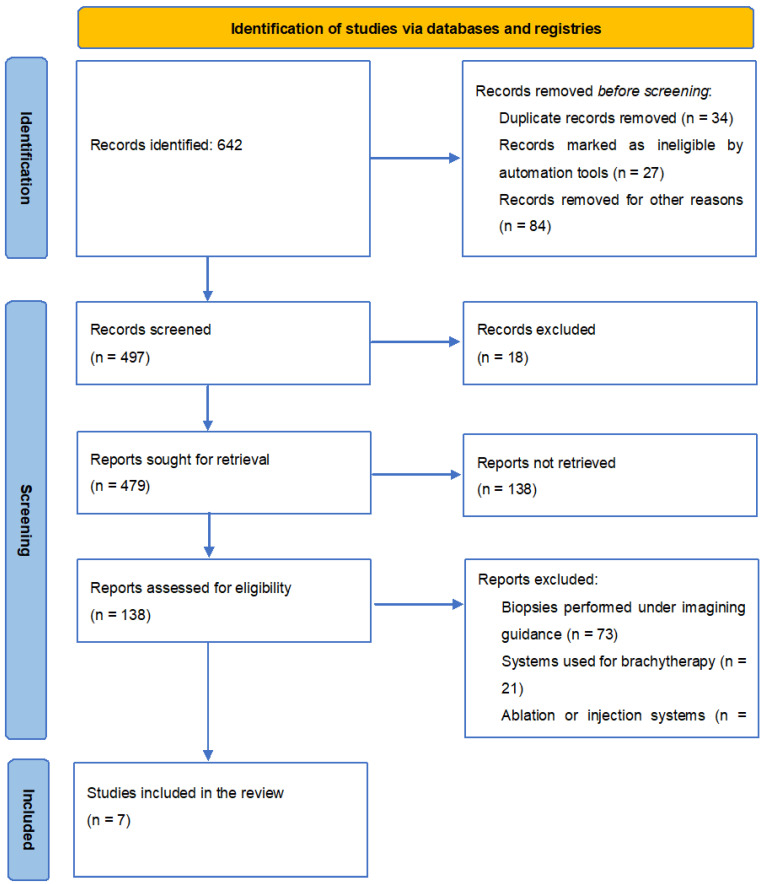
The present study is designed to synthesise the development of imaging techniques with a focus on ultrasonography in robotic surgery in the last ten years regarding abdominal surgical interventions.
All studies involved abdominal surgery. Out of the seven studies, two were performed in clinical trials. The other five studies were performed on organs or simulators and attempted to develop a hybrid surgical technique using ultrasonography and robotic surgery. Most studies aim to surgically identify both blood vessels and nerve structures through this combined technique (surgery and imaging).
Ultrasonography is often used in minimally invasive surgical techniques. This adds to the visualisation of blood vessels, the correct identification of tumour margins, and the location of surgical instruments in the tissue. The development of ultrasound technology from 2D to 3D and 4D has brought improvements in minimally invasive and robotic surgical techniques, and it should be further studied to bring surgery to a higher level.
手术技术中引入机器人引导程序提高了切除术的准确性和可控性。自腹腔镜技术发展以来,手术技术不断演进,腹腔镜技术从不同角度增加了对腹膜腔的可视化。与实时术中成像设备相关联的多臂机器人在某些手术领域带来了重要的可操作性和灵活性提升。
本研究旨在综合过去十年中关于腹部手术干预的机器人手术中以超声检查为重点的成像技术发展情况。
所有研究均涉及腹部手术。在七项研究中,两项在临床试验中进行。其他五项研究在器官或模拟器上进行,试图开发一种结合超声检查和机器人手术的混合手术技术。大多数研究旨在通过这种联合技术(手术和成像)在手术中识别血管和神经结构。
超声检查常用于微创手术技术。这增加了血管的可视化、肿瘤边缘的正确识别以及手术器械在组织中的定位。超声技术从二维发展到三维和四维,为微创手术和机器人手术技术带来了改进,应进一步研究以将手术提升到更高水平。