Zou Han, Lu Xiaoxuan, Jiang Hao, Xie Lihua
School of Electrical and Electronics Engineering, Nanyang Technological University, 50 Nanyang Ave, Singapore 639798, Singapore.
Sensors (Basel). 2015 Jan 15;15(1):1804-24. doi: 10.3390/s150101804.
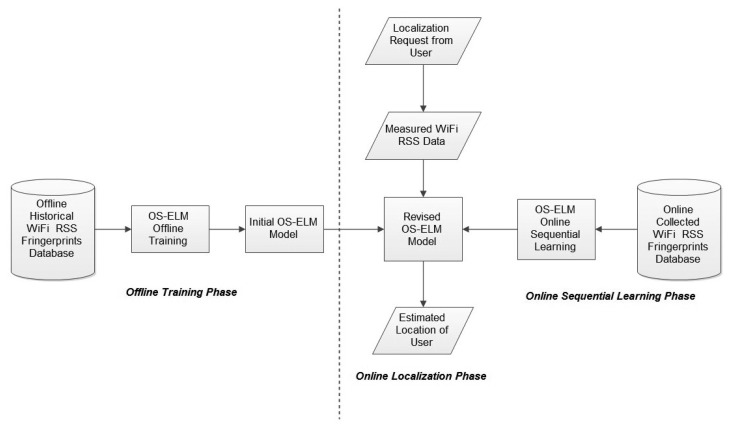
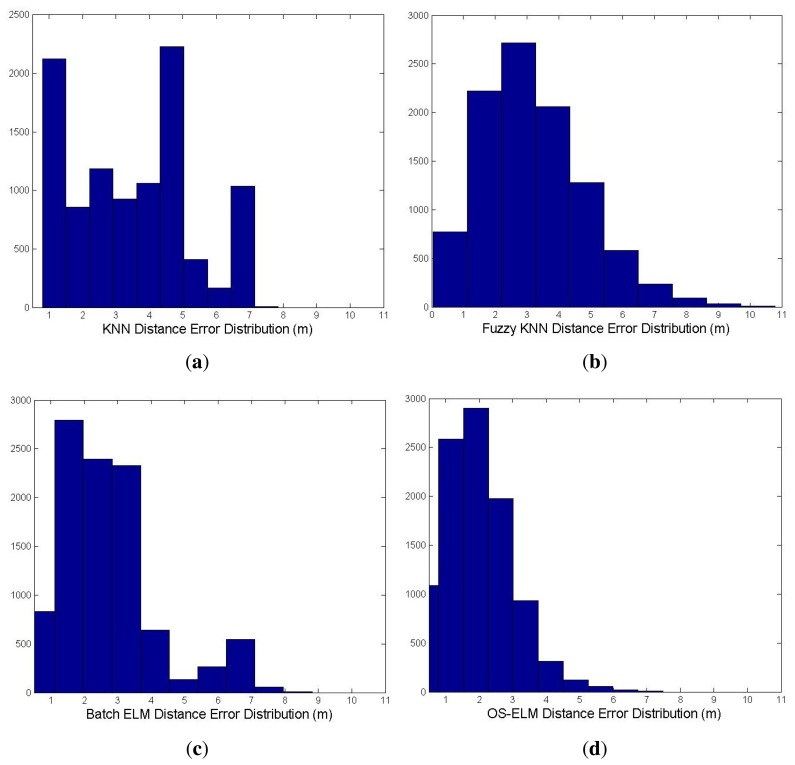
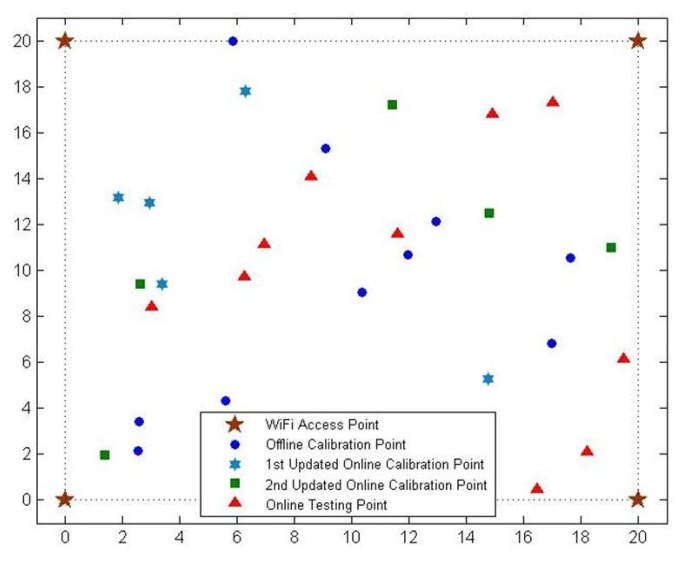
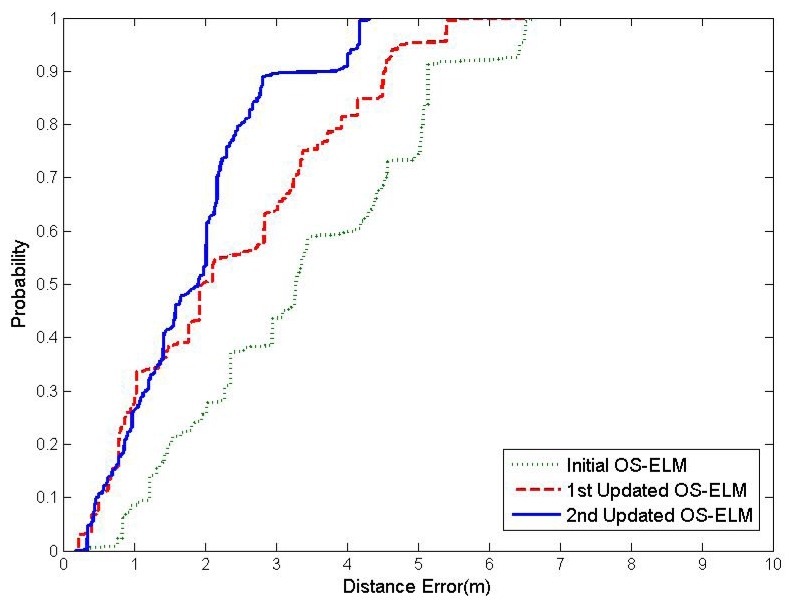
Nowadays, developing indoor positioning systems (IPSs) has become an attractive research topic due to the increasing demands on location-based service (LBS) in indoor environments. WiFi technology has been studied and explored to provide indoor positioning service for years in view of the wide deployment and availability of existing WiFi infrastructures in indoor environments. A large body of WiFi-based IPSs adopt fingerprinting approaches for localization. However, these IPSs suffer from two major problems: the intensive costs of manpower and time for offline site survey and the inflexibility to environmental dynamics. In this paper, we propose an indoor localization algorithm based on an online sequential extreme learning machine (OS-ELM) to address the above problems accordingly. The fast learning speed of OS-ELM can reduce the time and manpower costs for the offline site survey. Meanwhile, its online sequential learning ability enables the proposed localization algorithm to adapt in a timely manner to environmental dynamics. Experiments under specific environmental changes, such as variations of occupancy distribution and events of opening or closing of doors, are conducted to evaluate the performance of OS-ELM. The simulation and experimental results show that the proposed localization algorithm can provide higher localization accuracy than traditional approaches, due to its fast adaptation to various environmental dynamics.
如今,由于室内环境中基于位置服务(LBS)的需求不断增加,开发室内定位系统(IPS)已成为一个有吸引力的研究课题。鉴于室内环境中现有WiFi基础设施的广泛部署和可用性,多年来人们一直在研究和探索利用WiFi技术提供室内定位服务。大量基于WiFi的IPS采用指纹识别方法进行定位。然而,这些IPS存在两个主要问题:离线现场勘测的人力和时间成本高昂,以及对环境动态变化的适应性差。在本文中,我们提出了一种基于在线序列极限学习机(OS-ELM)的室内定位算法,以相应地解决上述问题。OS-ELM的快速学习速度可以减少离线现场勘测的时间和人力成本。同时,其在线序列学习能力使所提出的定位算法能够及时适应环境动态变化。我们进行了特定环境变化下的实验,如占用分布的变化以及门的开合事件,以评估OS-ELM的性能。仿真和实验结果表明,由于所提出的定位算法能够快速适应各种环境动态变化,因此它能提供比传统方法更高的定位精度。