IDSIA, Dalle Molle Institute for Artificial Intelligence, USI-SUPSI, CH-6928 Manno-Lugano, Switzerland ; Center for Computational Neuroscience and Neural Technology, Boston University , Boston, Massachusetts 02215, USA.
Physiology Section, Department of Integrative Medical Biology, Umeå University , S-90187 Umeå, Sweden ; Department of Kinesiology, Faculty of Physiotherapy, University School of Physical Education , Wroclaw 51-612, Poland.
Sci Data. 2014 Nov 25;1:140047. doi: 10.1038/sdata.2014.47. eCollection 2014.
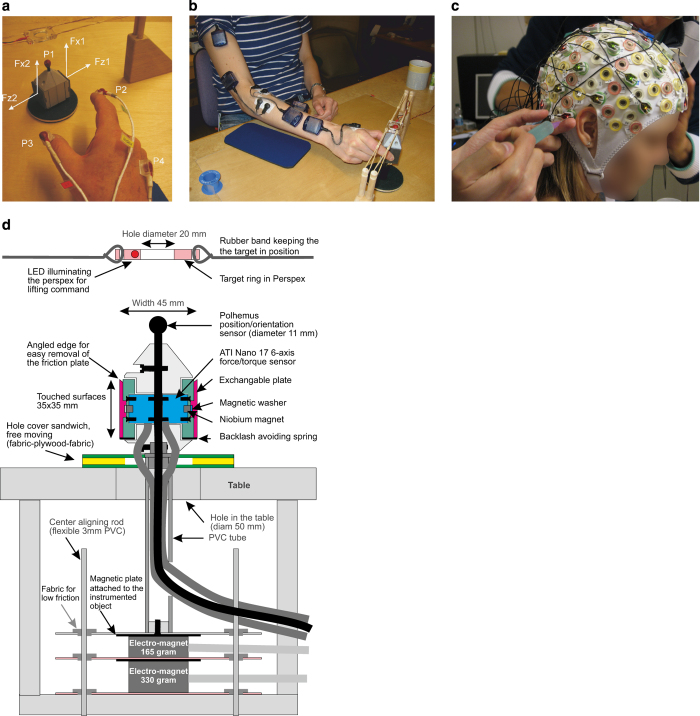
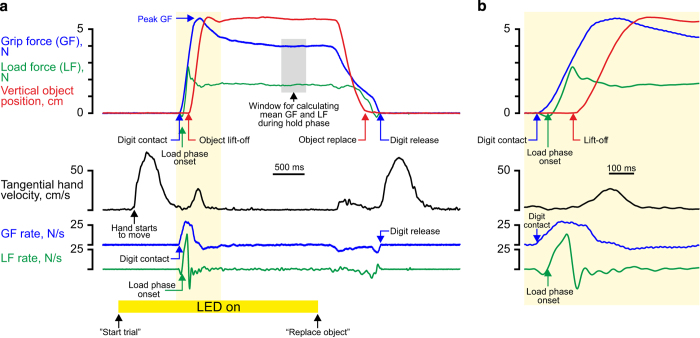
WAY-EEG-GAL is a dataset designed to allow critical tests of techniques to decode sensation, intention, and action from scalp EEG recordings in humans who perform a grasp-and-lift task. Twelve participants performed lifting series in which the object's weight (165, 330, or 660 g), surface friction (sandpaper, suede, or silk surface), or both, were changed unpredictably between trials, thus enforcing changes in fingertip force coordination. In each of a total of 3,936 trials, the participant was cued to reach for the object, grasp it with the thumb and index finger, lift it and hold it for a couple of seconds, put it back on the support surface, release it, and, lastly, to return the hand to a designated rest position. We recorded EEG (32 channels), EMG (five arm and hand muscles), the 3D position of both the hand and object, and force/torque at both contact plates. For each trial we provide 16 event times (e.g., 'object lift-off') and 18 measures that characterize the behaviour (e.g., 'peak grip force').
WAY-EEG-GAL 数据集旨在允许对从执行抓握和提升任务的人类头皮 EEG 记录中解码感觉、意图和动作的技术进行关键测试。十二名参与者进行了提升系列,其中物体的重量(165、330 或 660g)、表面摩擦力(砂纸、麂皮或丝绸表面)或两者在试验之间不可预测地变化,从而强制改变指尖力协调。在总共 3936 次试验中的每一次中,参与者都被提示伸手去拿物体,用拇指和食指抓住它,将其提起并保持几秒钟,将其放回支撑表面,松开它,最后将手放回指定的休息位置。我们记录了 EEG(32 个通道)、EMG(五个手臂和手部肌肉)、手和物体的 3D 位置以及两个接触板的力/扭矩。对于每次试验,我们提供 16 个事件时间(例如,“物体起飞”)和 18 个描述行为的度量(例如,“最大握力”)。