Feng Yibo, Li Xisheng, Zhang Xiaojuan
School of Automation and Electrical Engineering, University of Science and Technology Beijing, Beijing 100083, China.
Sensors (Basel). 2015 May 13;15(5):11222-38. doi: 10.3390/s150511222.
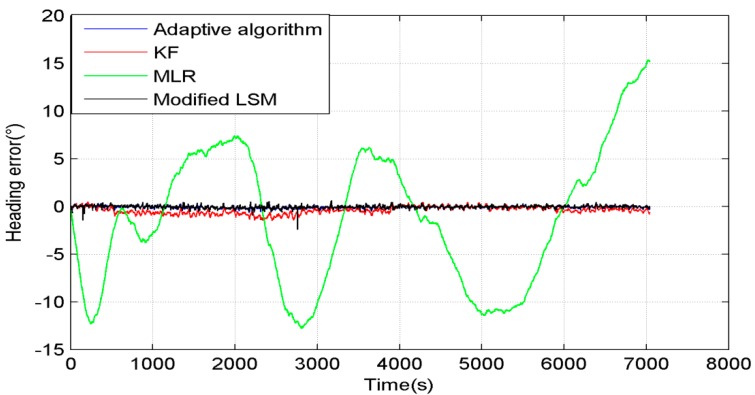
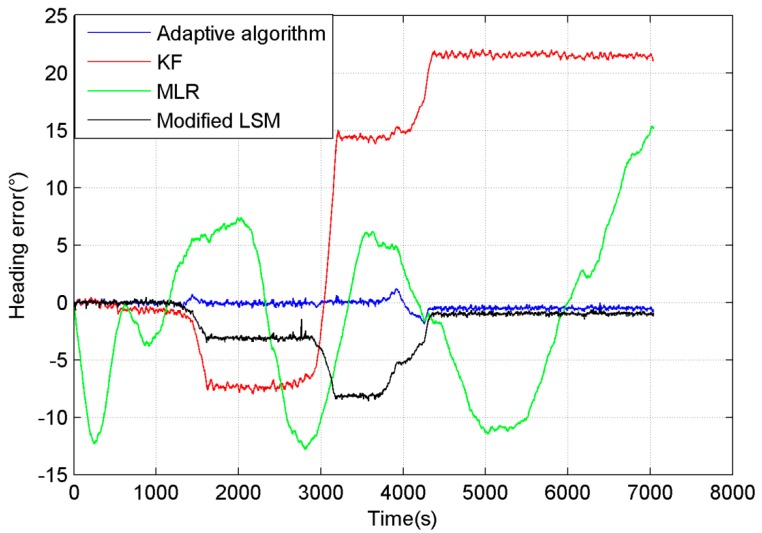
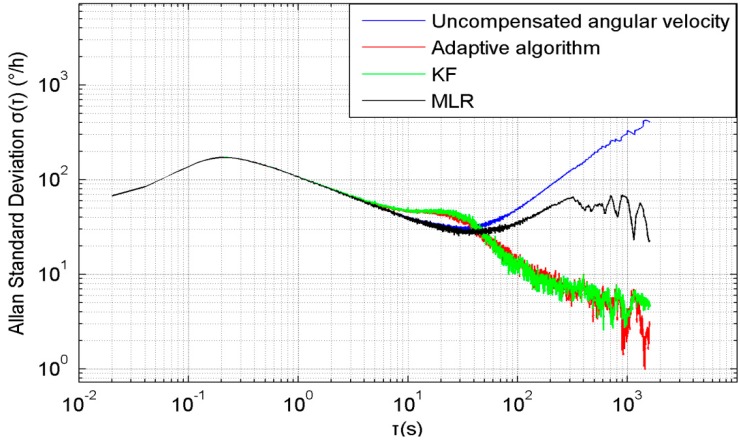
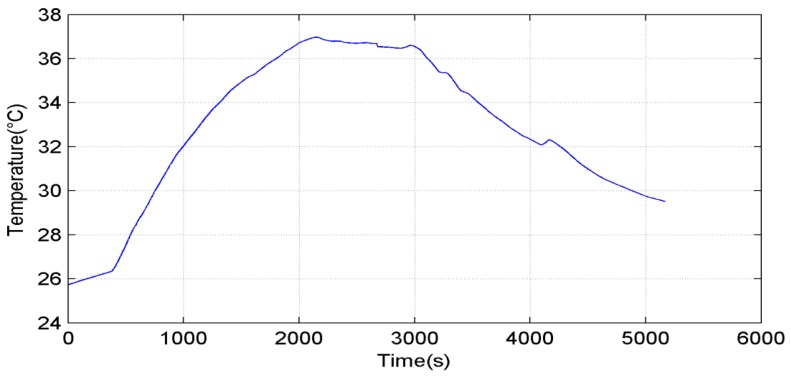
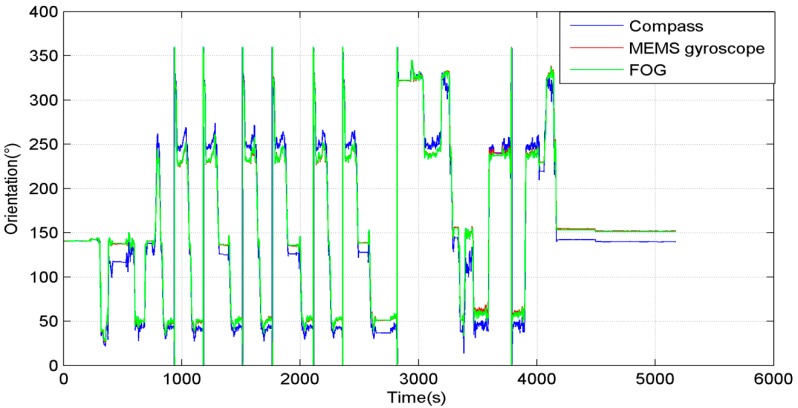
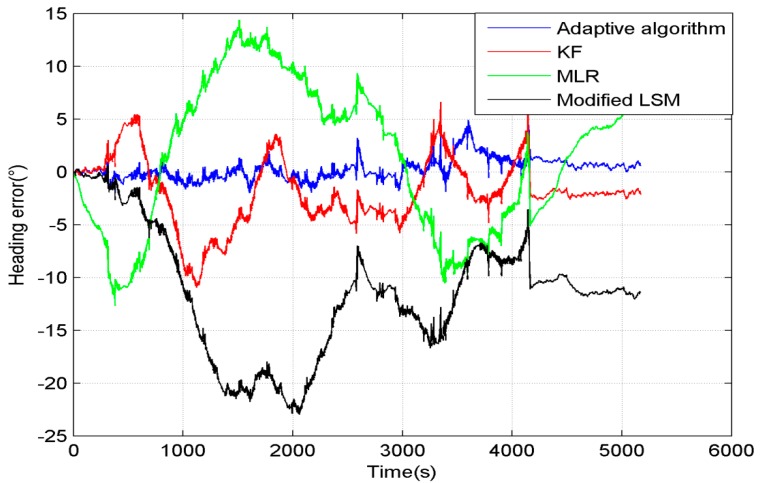
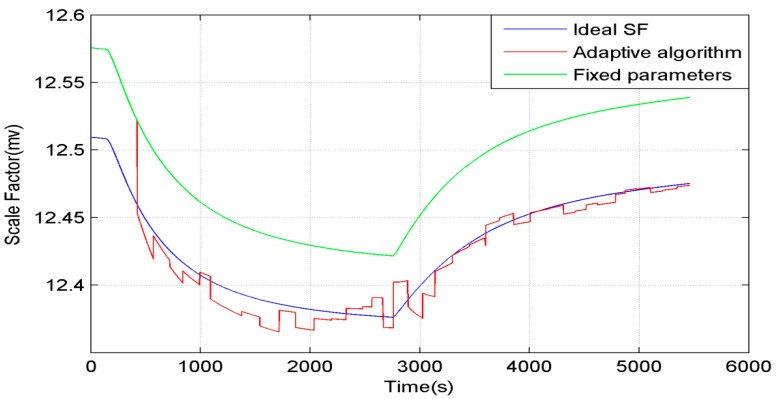
We present an adaptive algorithm for a system integrated with micro-electro-mechanical systems (MEMS) gyroscopes and a compass to eliminate the influence from the environment, compensate the temperature drift precisely, and improve the accuracy of the MEMS gyroscope. We use a simplified drift model and changing but appropriate model parameters to implement this algorithm. The model of MEMS gyroscope temperature drift is constructed mostly on the basis of the temperature sensitivity of the gyroscope. As the state variables of a strong tracking Kalman filter (STKF), the parameters of the temperature drift model can be calculated to adapt to the environment under the support of the compass. These parameters change intelligently with the environment to maintain the precision of the MEMS gyroscope in the changing temperature. The heading error is less than 0.6° in the static temperature experiment, and also is kept in the range from 5° to -2° in the dynamic outdoor experiment. This demonstrates that the proposed algorithm exhibits strong adaptability to a changing temperature, and performs significantly better than KF and MLR to compensate the temperature drift of a gyroscope and eliminate the influence of temperature variation.
我们提出了一种适用于集成了微机电系统(MEMS)陀螺仪和指南针的系统的自适应算法,以消除环境影响,精确补偿温度漂移,并提高MEMS陀螺仪的精度。我们使用简化的漂移模型和变化但合适的模型参数来实现该算法。MEMS陀螺仪温度漂移模型主要基于陀螺仪的温度灵敏度构建。作为强跟踪卡尔曼滤波器(STKF)的状态变量,温度漂移模型的参数可以在指南针的支持下进行计算,以适应环境。这些参数会随着环境智能变化,以在不断变化的温度下保持MEMS陀螺仪的精度。在静态温度实验中,航向误差小于0.6°,在动态户外实验中也保持在5°至 -2°的范围内。这表明所提出的算法对变化的温度具有很强的适应性,并且在补偿陀螺仪温度漂移和消除温度变化影响方面的性能明显优于卡尔曼滤波器(KF)和多元线性回归(MLR)。