Martínez-Rey Miguel, Espinosa Felipe, Gardel Alfredo, Santos Carlos
Department of Electronics, University of Alcalá. Polytechnic School, Campus Universitario, Alcalá de Henares 28871, Spain.
Sensors (Basel). 2015 Jun 19;15(6):14569-90. doi: 10.3390/s150614569.
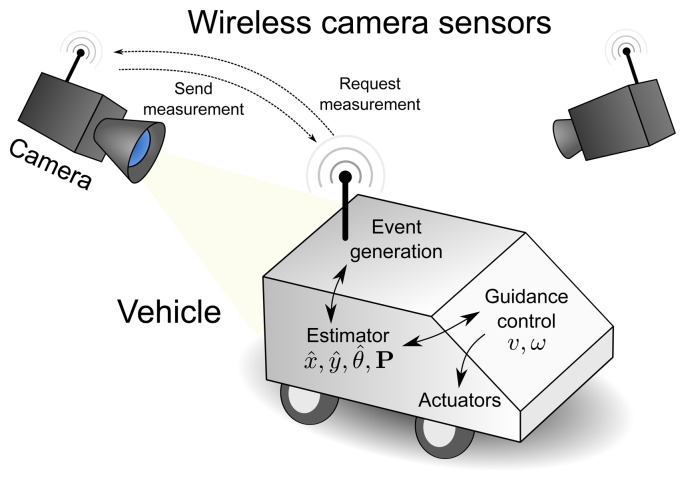
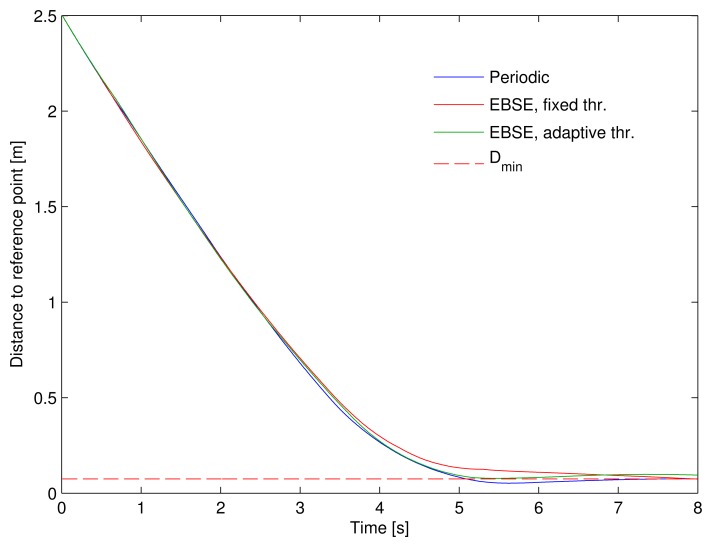
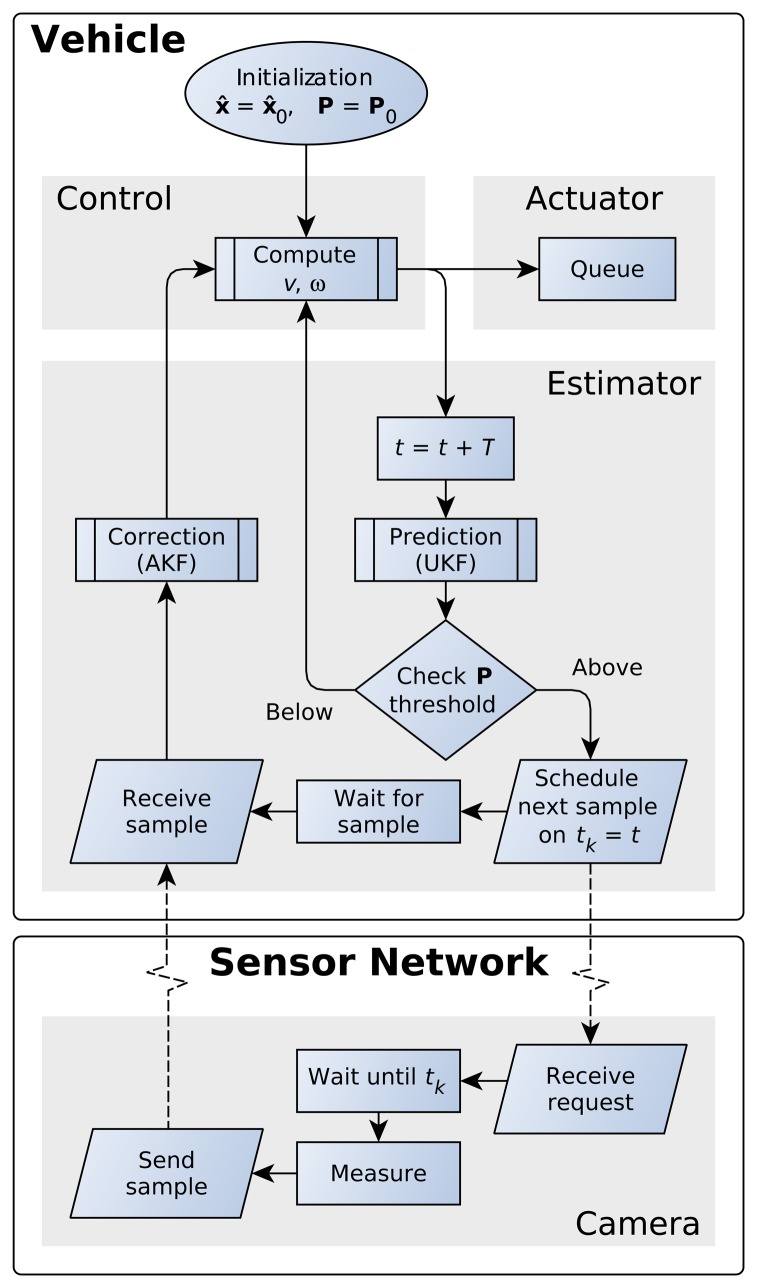
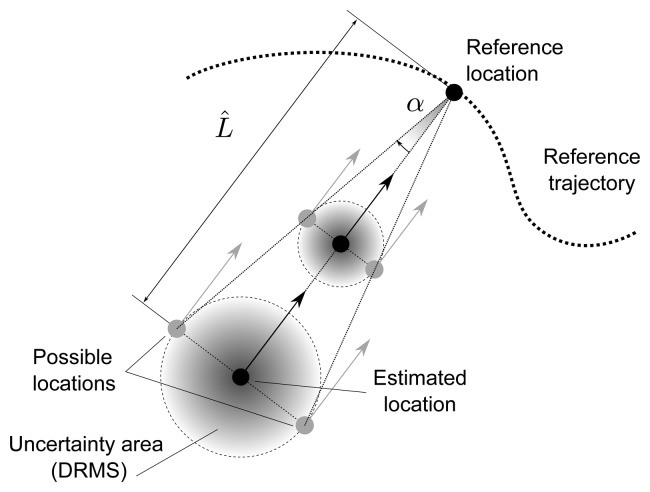
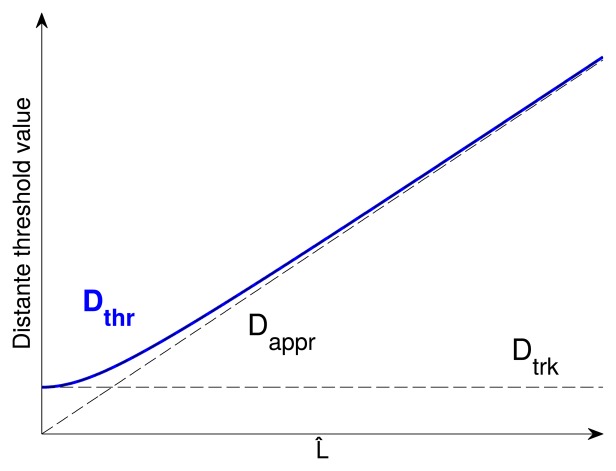
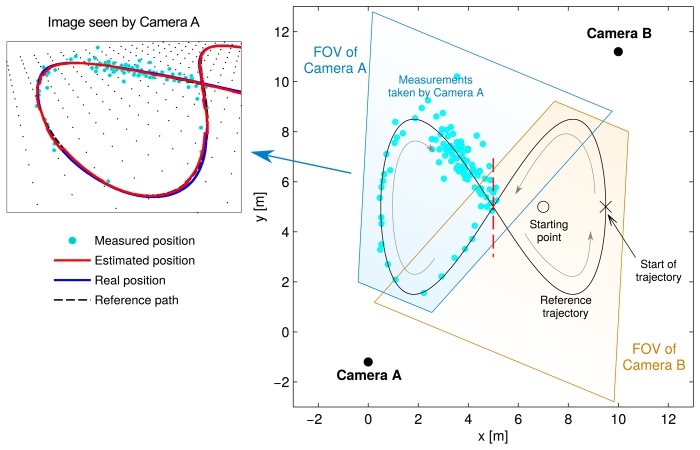
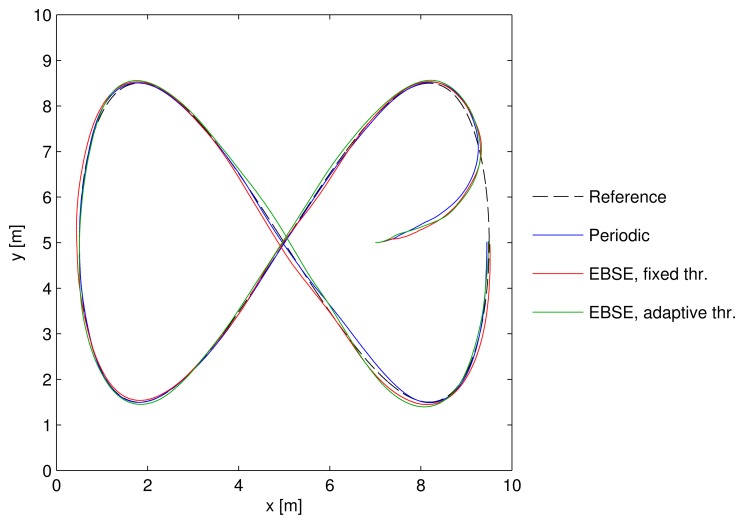
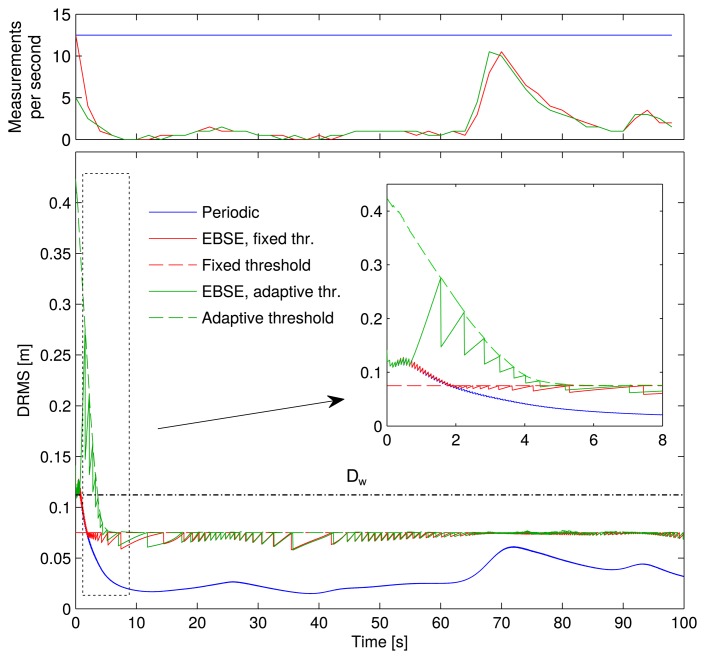
For the problem of pose estimation of an autonomous vehicle using networked external sensors, the processing capacity and battery consumption of these sensors, as well as the communication channel load should be optimized. Here, we report an event-based state estimator (EBSE) consisting of an unscented Kalman filter that uses a triggering mechanism based on the estimation error covariance matrix to request measurements from the external sensors. This EBSE generates the events of the estimator module on-board the vehicle and, thus, allows the sensors to remain in stand-by mode until an event is generated. The proposed algorithm requests a measurement every time the estimation distance root mean squared error (DRMS) value, obtained from the estimator's covariance matrix, exceeds a threshold value. This triggering threshold can be adapted to the vehicle's working conditions rendering the estimator even more efficient. An example of the use of the proposed EBSE is given, where the autonomous vehicle must approach and follow a reference trajectory. By making the threshold a function of the distance to the reference location, the estimator can halve the use of the sensors with a negligible deterioration in the performance of the approaching maneuver.
针对使用联网外部传感器的自动驾驶车辆的位姿估计问题,需要优化这些传感器的处理能力、电池消耗以及通信信道负载。在此,我们报告一种基于事件的状态估计器(EBSE),它由一个无迹卡尔曼滤波器组成,该滤波器使用基于估计误差协方差矩阵的触发机制来请求外部传感器进行测量。这种EBSE在车辆上生成估计器模块的事件,从而允许传感器保持在待机模式,直到生成一个事件。所提出的算法每当从估计器的协方差矩阵获得的估计距离均方根误差(DRMS)值超过阈值时就请求一次测量。该触发阈值可以根据车辆的工作条件进行调整,从而使估计器更加高效。给出了所提出的EBSE的一个应用示例,其中自动驾驶车辆必须接近并跟踪一条参考轨迹。通过使阈值成为到参考位置距离的函数,估计器可以在接近机动性能的恶化可忽略不计的情况下,将传感器的使用量减半。