Department of Informatics/ Center for Robotics Research, King's College London, London, United Kingdom.
MRC Center for Transplantation, DTIMB & NIHR BRC, King's College London, London, United Kingdom.
PLoS One. 2015 Jul 22;10(7):e0132020. doi: 10.1371/journal.pone.0132020. eCollection 2015.
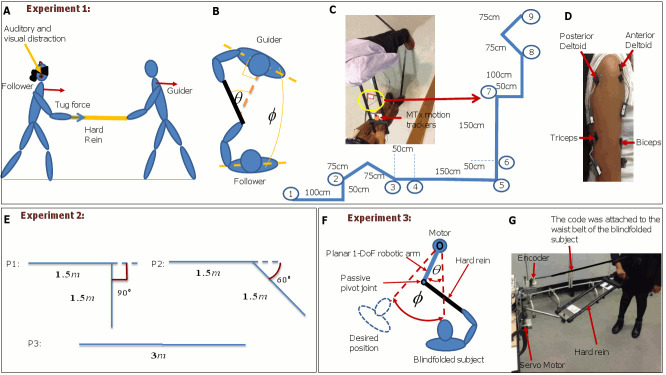
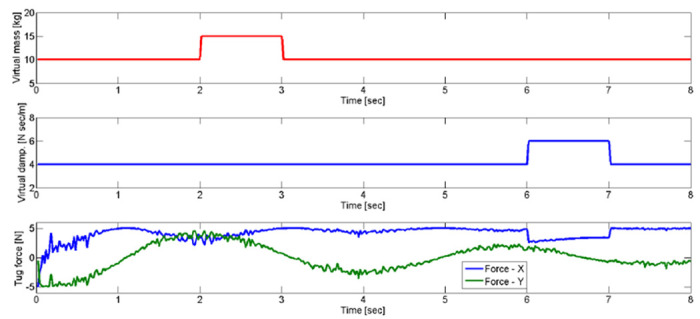
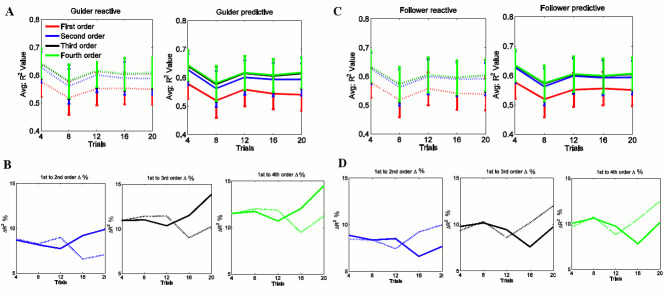
This paper presents identifications of human-human interaction in which one person with limited auditory and visual perception of the environment (a follower) is guided by an agent with full perceptual capabilities (a guider) via a hard rein along a given path. We investigate several identifications of the interaction between the guider and the follower such as computational models that map states of the follower to actions of the guider and the computational basis of the guider to modulate the force on the rein in response to the trust level of the follower. Based on experimental identification systems on human demonstrations show that the guider and the follower experience learning for an optimal stable state-dependent novel 3rd and 2nd order auto-regressive predictive and reactive control policies respectively. By modeling the follower's dynamics using a time varying virtual damped inertial system, we found that the coefficient of virtual damping is most appropriate to explain the trust level of the follower at any given time. Moreover, we present the stability of the extracted guiding policy when it was implemented on a planar 1-DoF robotic arm. Our findings provide a theoretical basis to design advanced human-robot interaction algorithms applicable to a variety of situations where a human requires the assistance of a robot to perceive the environment.
本文提出了一种人类与人类之间的交互识别方法,其中一个人对环境的听觉和视觉感知有限(跟随者),由一个具有完全感知能力的代理人(引导者)通过硬缰绳沿着给定的路径进行引导。我们研究了几种引导者和跟随者之间的交互识别方法,例如将跟随者的状态映射到引导者的动作的计算模型,以及引导者的计算基础来调制缰绳上的力以响应跟随者的信任水平。基于人类演示的实验识别系统表明,引导者和跟随者都经历了学习,以实现最优的稳定状态相关的新的三阶和二阶自回归预测和反应控制策略。通过使用时变虚拟阻尼惯性系统对跟随者的动力学进行建模,我们发现虚拟阻尼系数最适合解释跟随者在任何给定时间的信任水平。此外,我们还提出了在平面 1-DOF 机械臂上实施提取的引导策略时的稳定性。我们的研究结果为设计适用于各种情况的先进人机交互算法提供了理论基础,在这些情况下,人类需要机器人的帮助来感知环境。