Cutkosky Mark R
Department of Mechanical Engineering , Stanford University , Stanford, CA 94305 , USA.
Interface Focus. 2015 Aug 6;5(4):20150015. doi: 10.1098/rsfs.2015.0015.
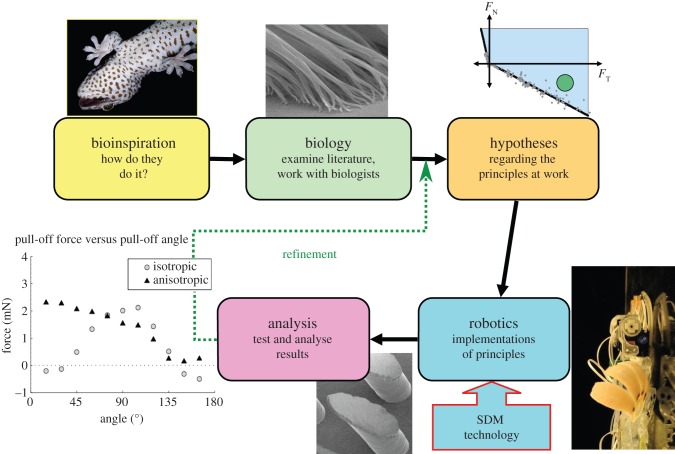
Bioinspiration is an increasingly popular design paradigm, especially as robots venture out of the laboratory and into the world. Animals are adept at coping with the variability that the world imposes. With advances in scientific tools for understanding biological structures in detail, we are increasingly able to identify design features that account for animals' robust performance. In parallel, advances in fabrication methods and materials are allowing us to engineer artificial structures with similar properties. The resulting robots become useful platforms for testing hypotheses about which principles are most important. Taking gecko-inspired climbing as an example, we show that the process of extracting principles from animals and adapting them to robots provides insights for both robotics and biology.
生物灵感是一种越来越流行的设计范式,尤其是当机器人走出实验室进入现实世界时。动物善于应对现实世界带来的各种变化。随着详细了解生物结构的科学工具的进步,我们越来越能够识别出那些造就动物强大性能的设计特征。与此同时,制造方法和材料的进步使我们能够设计出具有类似特性的人工结构。由此产生的机器人成为了测试哪些原理最为重要的假设的有用平台。以受壁虎启发的攀爬为例,我们表明,从动物身上提取原理并将其应用于机器人的过程,为机器人技术和生物学都提供了深刻见解。