Do Thanh Nho, Seah Tian En Timothy, Phee Soo Jay
School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore.
School of Mechanical and Aerospace Engineering, Nanyang Technological University.
IEEE Trans Biomed Eng. 2016 Jun;63(6):1229-1238. doi: 10.1109/TBME.2015.2491327. Epub 2015 Oct 15.
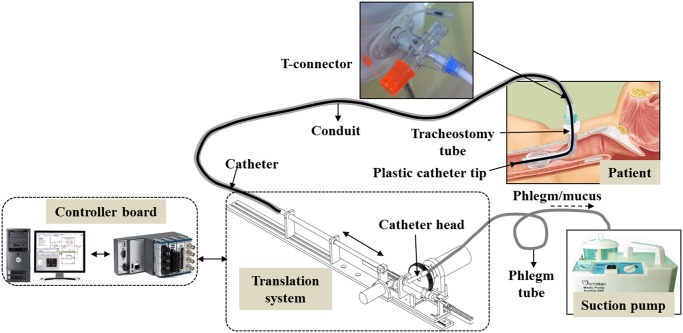
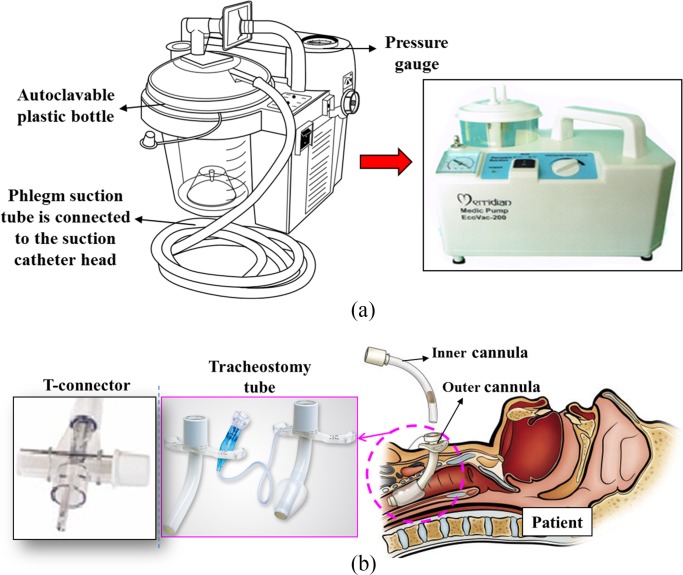
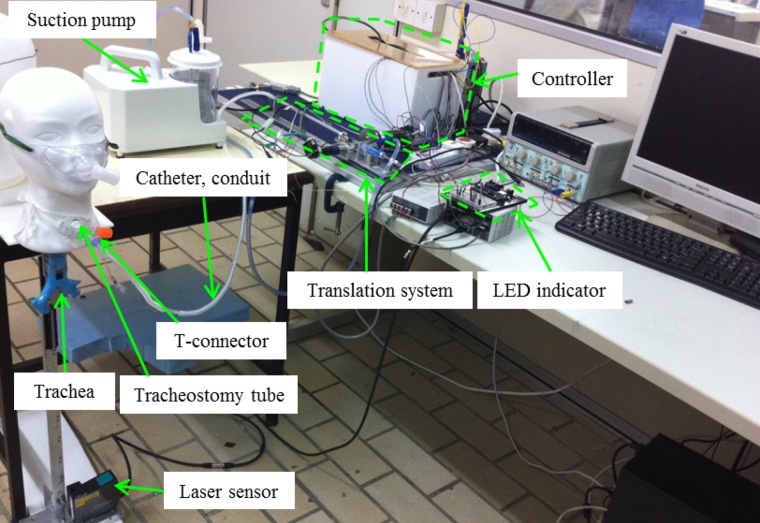
Mechanical ventilation is required to aid patients with breathing difficulty to breathe more comfortably. A tracheostomy tube inserted through an opening in the patient neck into the trachea is connected to a ventilator for suctioning. Currently, nurses spend millions of person-hours yearly to perform this task. To save significant person-hours, an automated mechatronic tracheostomy system is needed. This system allows for relieving nurses and other carers from the millions of person-hours spent yearly on tracheal suctioning. In addition, it will result in huge healthcare cost savings.
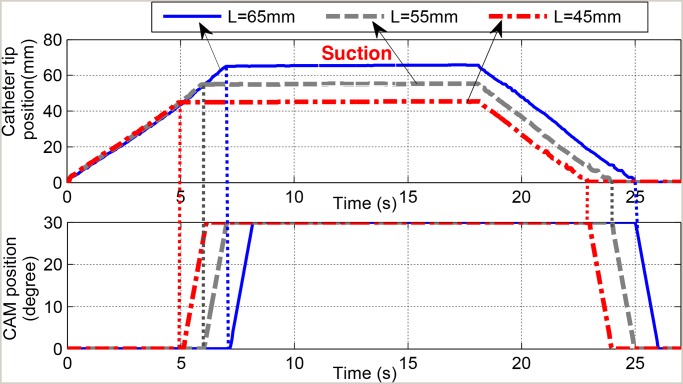
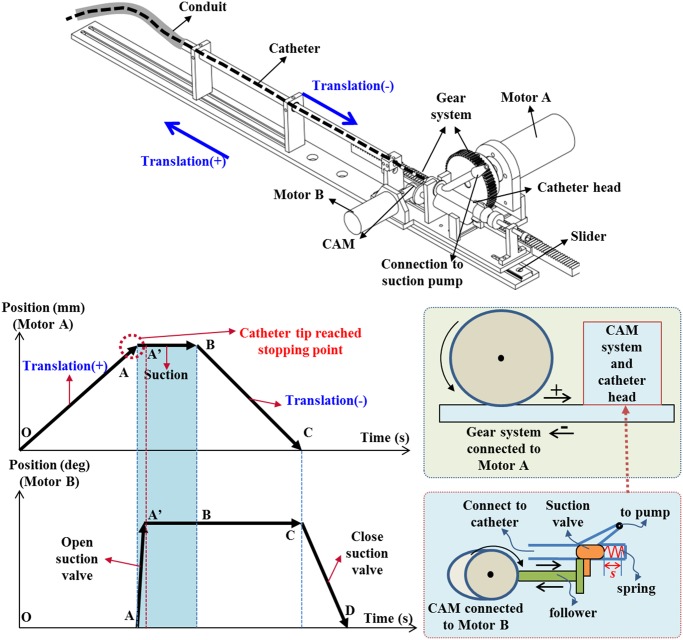
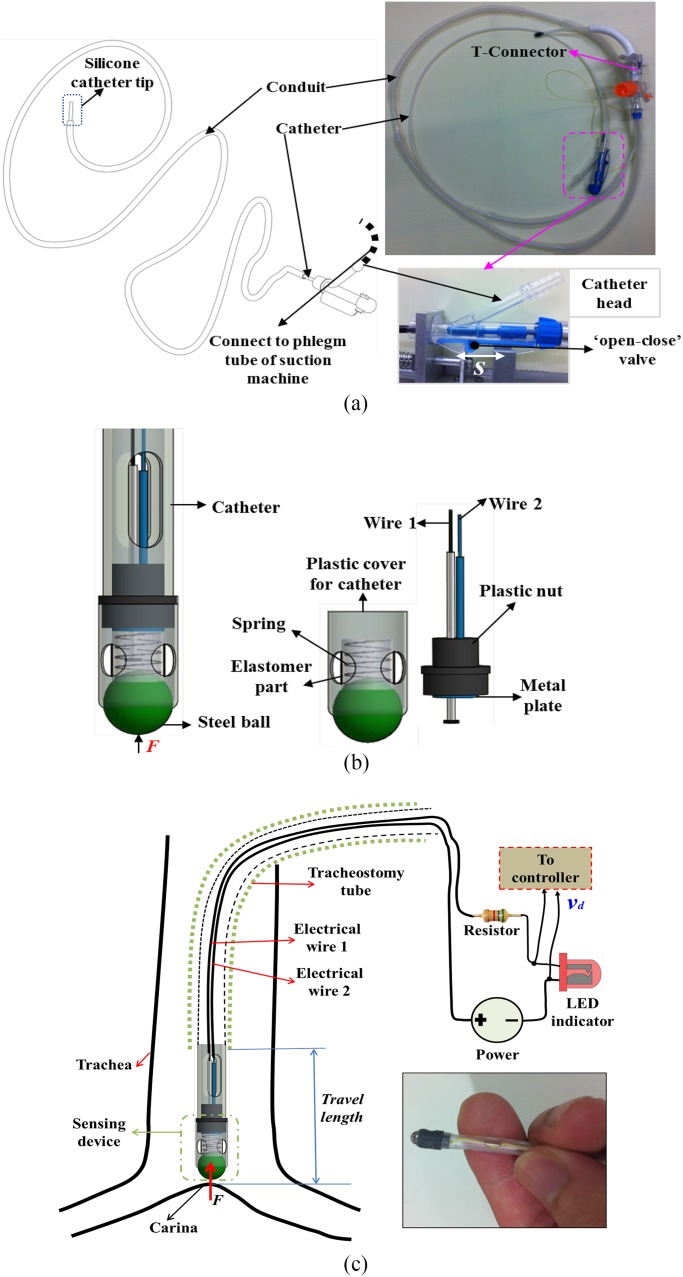
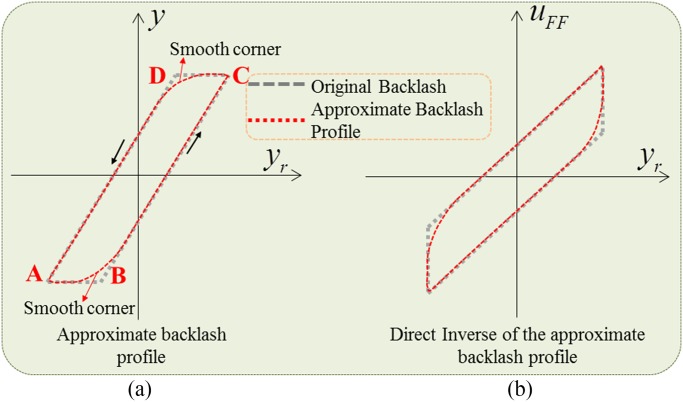
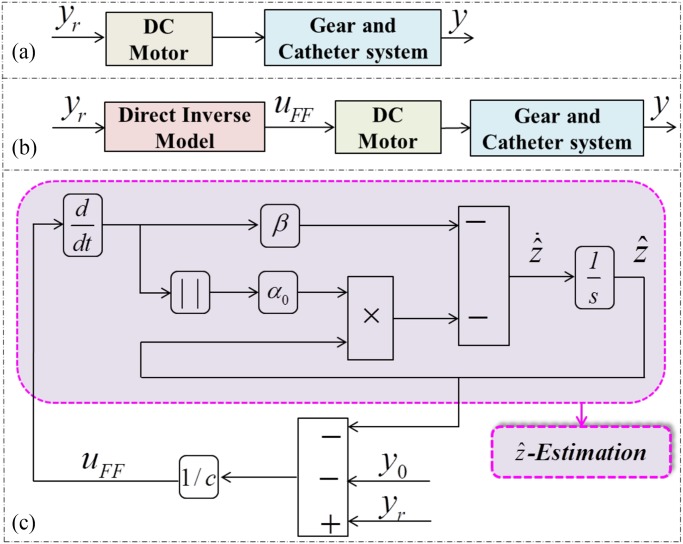
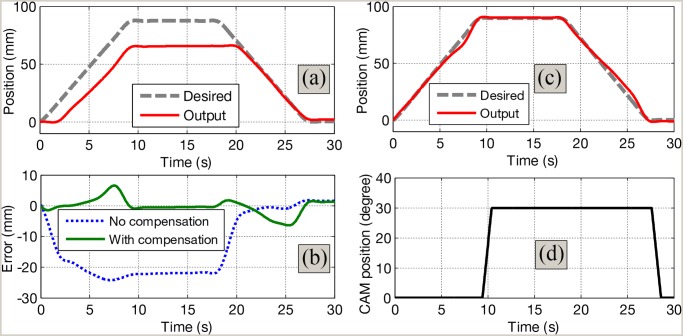
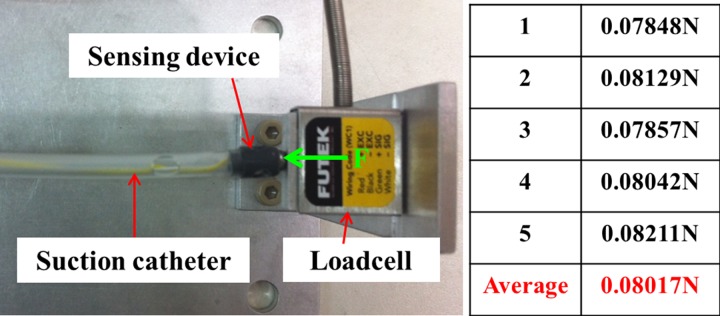
We introduce a novel mechatronic tracheostomy system including the development of a long suction catheter, automatic suctioning mechanisms, and relevant control approaches to perform tracheal suctioning automatically. To stop the catheter at a desired position, two approaches are introduced: 1) Based on the known travel length of the catheter tip; 2) Based on a new sensing device integrated at the catheter tip. It is known that backlash nonlinearity between the suction catheter and its conduit as well as in the gear system of the actuator are unavoidable. They cause difficulties to control the exact position of the catheter tip. For the former case, we develop an approximate model of backlash and a direct inverse scheme to enhance the system performances. The scheme does not require any complex inversions of the backlash model and allows easy implementations. For the latter case, a new sensing device integrated into the suction catheter tip is developed and backlash compensation controls are avoided.
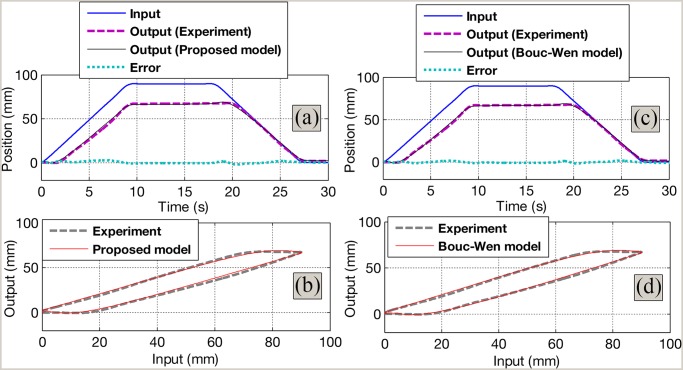
Automated suctioning validations are successfully carried out on the proposed experimental system. Comparisons and discussions are also introduced.
The results demonstrate a significant contribution and potential benefits to the mechanical ventilation areas.
机械通气用于帮助呼吸困难的患者更舒适地呼吸。通过患者颈部开口插入气管的气管造口管连接到呼吸机以进行抽吸。目前,护士每年花费数百万人工时来执行这项任务。为了节省大量人工时,需要一种自动化的机电一体化气管造口系统。该系统可以使护士和其他护理人员从每年花费在气管抽吸上的数百万人工时中解脱出来。此外,这将带来巨大的医疗成本节省。
我们介绍一种新型的机电一体化气管造口系统,包括长抽吸导管的开发、自动抽吸机制以及自动进行气管抽吸的相关控制方法。为了将导管停在期望位置,介绍了两种方法:1)基于导管尖端已知的行进长度;2)基于集成在导管尖端的新型传感装置。众所周知,抽吸导管与其导管之间以及致动器齿轮系统中不可避免地存在间隙非线性。它们给控制导管尖端的精确位置带来困难。对于前一种情况,我们开发了间隙的近似模型和直接逆方案以提高系统性能。该方案不需要间隙模型的任何复杂求逆,并且易于实现。对于后一种情况,开发了一种集成到抽吸导管尖端的新型传感装置,并避免了间隙补偿控制。
在所提出的实验系统上成功进行了自动抽吸验证。还进行了比较和讨论。
结果证明了对机械通气领域的重大贡献和潜在益处。