Lu Keyu, Li Jian, An Xiangjing, He Hangen
College of Mechatronic Engineering and Automation, National University of Defense Technology, Changsha 410073, Hunan, China.
Sensors (Basel). 2015 Nov 24;15(11):29594-617. doi: 10.3390/s151129594.
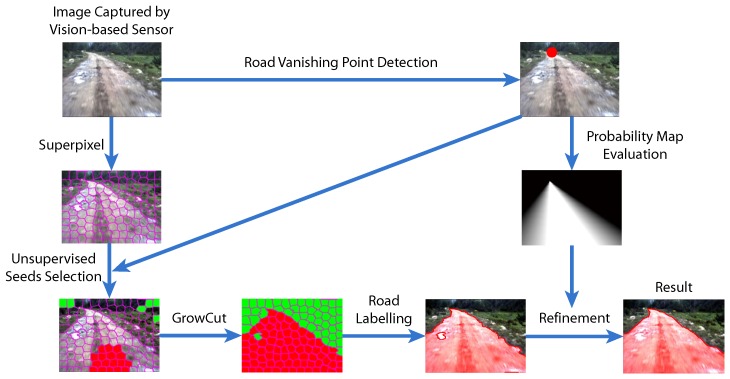
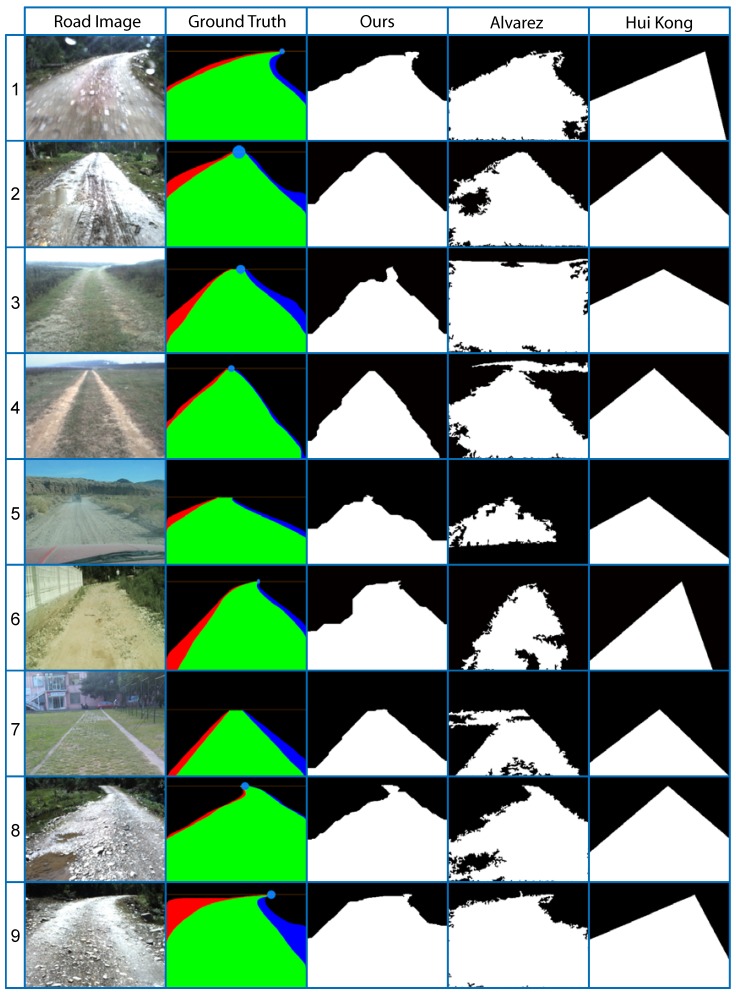
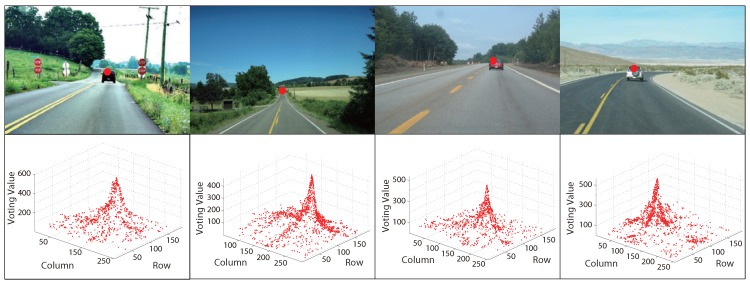
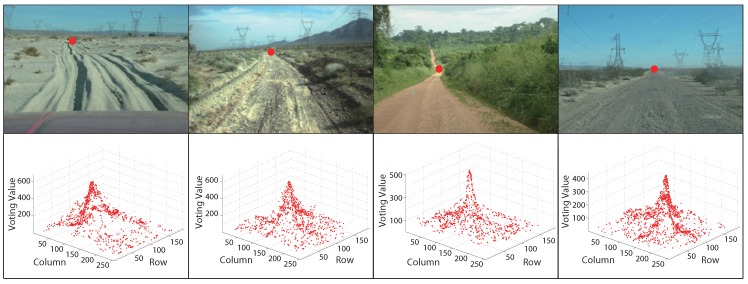
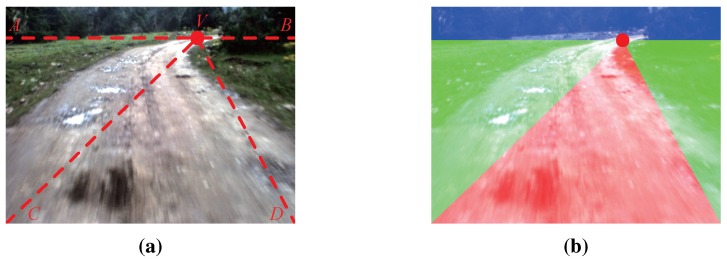
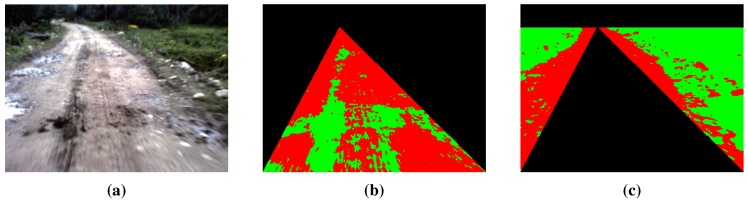
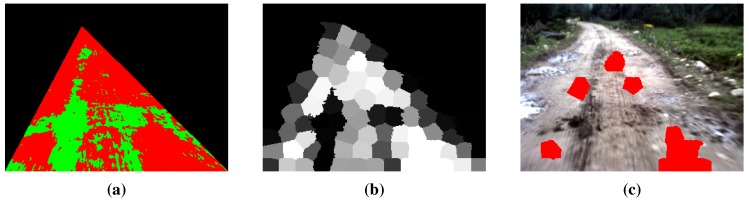
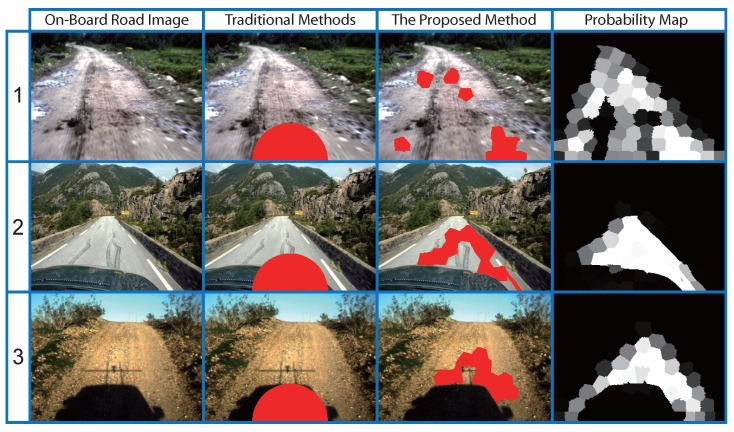
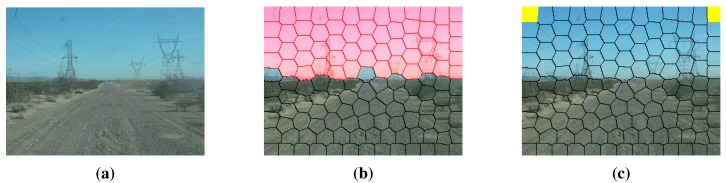
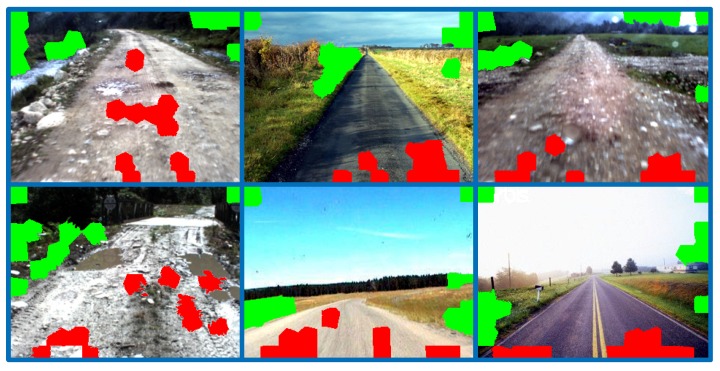
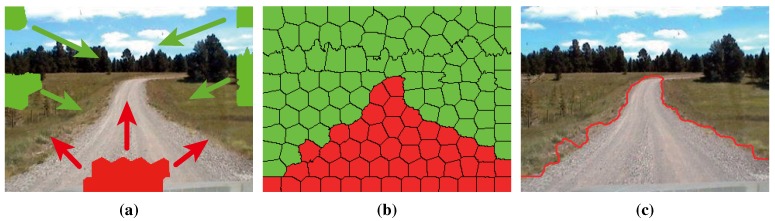
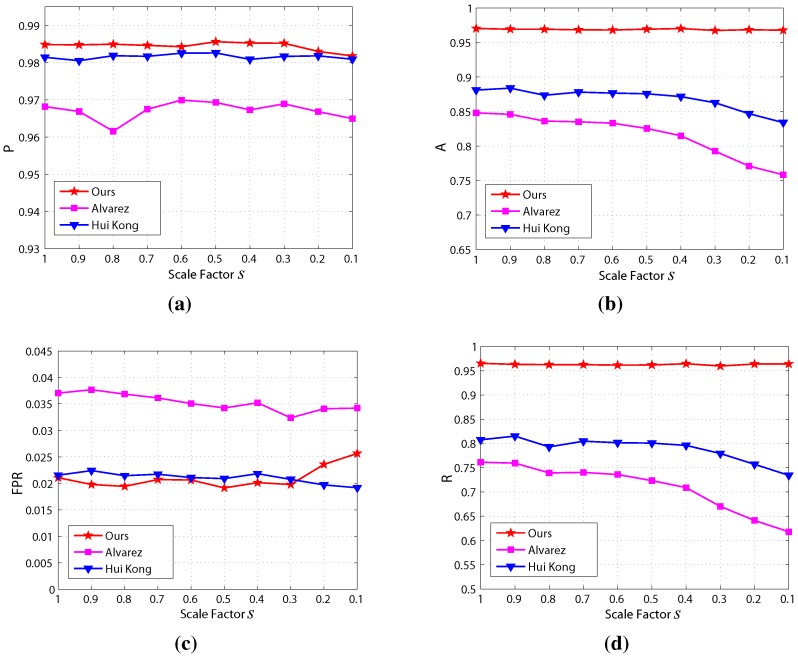
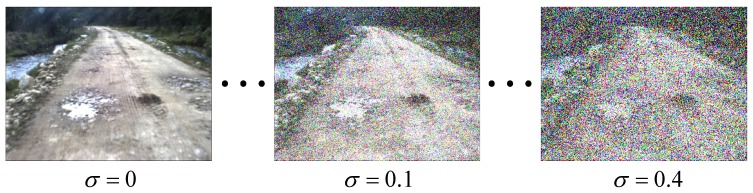
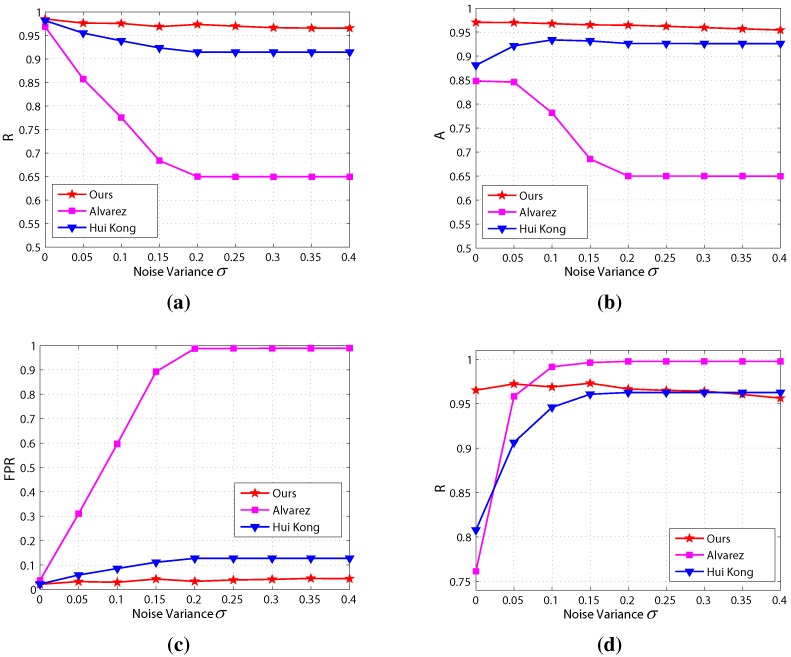
Road detection is an essential component of field robot navigation systems. Vision sensors play an important role in road detection for their great potential in environmental perception. In this paper, we propose a hierarchical vision sensor-based method for robust road detection in challenging road scenes. More specifically, for a given road image captured by an on-board vision sensor, we introduce a multiple population genetic algorithm (MPGA)-based approach for efficient road vanishing point detection. Superpixel-level seeds are then selected in an unsupervised way using a clustering strategy. Then, according to the GrowCut framework, the seeds proliferate and iteratively try to occupy their neighbors. After convergence, the initial road segment is obtained. Finally, in order to achieve a globally-consistent road segment, the initial road segment is refined using the conditional random field (CRF) framework, which integrates high-level information into road detection. We perform several experiments to evaluate the common performance, scale sensitivity and noise sensitivity of the proposed method. The experimental results demonstrate that the proposed method exhibits high robustness compared to the state of the art.
道路检测是野外机器人导航系统的重要组成部分。视觉传感器因其在环境感知方面的巨大潜力,在道路检测中发挥着重要作用。在本文中,我们提出了一种基于分层视觉传感器的方法,用于在具有挑战性的道路场景中进行稳健的道路检测。具体而言,对于车载视觉传感器捕获的给定道路图像,我们引入一种基于多种群遗传算法(MPGA)的方法来高效检测道路消失点。然后,使用聚类策略以无监督方式选择超像素级种子。接着,根据GrowCut框架,种子扩散并迭代尝试占据其相邻区域。收敛后,获得初始道路段。最后,为了实现全局一致的道路段,使用条件随机场(CRF)框架对初始道路段进行细化,该框架将高级信息集成到道路检测中。我们进行了多项实验来评估所提方法的通用性能、尺度敏感性和噪声敏感性。实验结果表明,与现有技术相比,所提方法具有很高的鲁棒性。