Escuela de Ingeniería Eléctrica, Pontificia Universidad Católica de Valparaíso, Av. Brasil 2147, Valparaíso 2362804, Chile.
Departamento de Informática y Automática, Universidad Nacional de Educación a Distancia, Juan del Rosal 16, 28040 Madrid, Spain.
Sensors (Basel). 2020 Sep 21;20(18):5409. doi: 10.3390/s20185409.
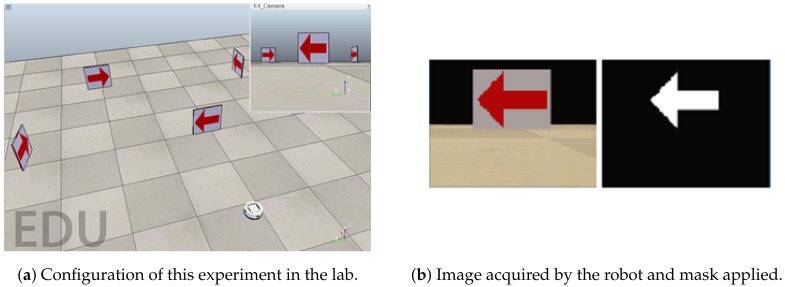
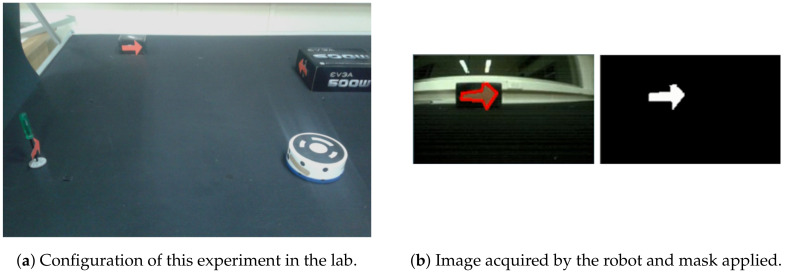
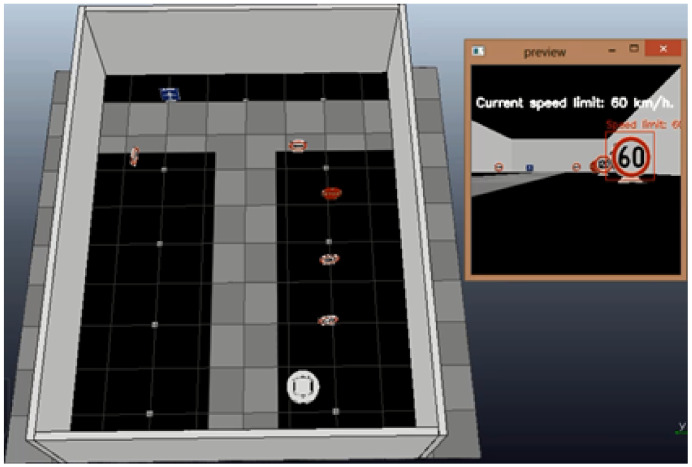
This work presents the development and implementation of a distributed navigation system based on object recognition algorithms. The main goal is to introduce advanced algorithms for image processing and artificial intelligence techniques for teaching control of mobile robots. The autonomous system consists of a wheeled mobile robot with an integrated color camera. The robot navigates through a laboratory scenario where the track and several traffic signals must be detected and recognized by using the images acquired with its on-board camera. The images are sent to a computer server that performs a computer vision algorithm to recognize the objects. The computer calculates the corresponding speeds of the robot according to the object detected. The speeds are sent back to the robot, which acts to carry out the corresponding manoeuvre. Three different algorithms have been tested in simulation and a practical mobile robot laboratory. The results show an average of 84% success rate for object recognition in experiments with the real mobile robot platform.
这项工作提出了一种基于目标识别算法的分布式导航系统的开发和实现。主要目标是引入先进的图像处理算法和人工智能技术,用于教学控制移动机器人。自主系统由一个带有集成彩色摄像机的轮式移动机器人组成。机器人通过一个实验室场景进行导航,在该场景中,必须使用其车载摄像机获取的图像检测和识别轨迹和几个交通信号灯。图像被发送到一台计算机服务器,该服务器执行计算机视觉算法来识别对象。计算机根据检测到的对象计算机器人的相应速度。速度被发送回机器人,机器人根据相应的动作进行操作。在模拟和实际的移动机器人实验室中测试了三种不同的算法。实验结果表明,在使用真实移动机器人平台进行的实验中,目标识别的平均成功率为 84%。