Arkenbout Ewout A, de Winter Joost C F, Breedveld Paul
Department of Biomechanical Engineering, Faculty of Mechanical, Maritime and Materials Engineering, Delft University of Technology, Mekelweg 2, 2628 CD Delft, The Netherlands.
Sensors (Basel). 2015 Dec 15;15(12):31644-71. doi: 10.3390/s151229868.
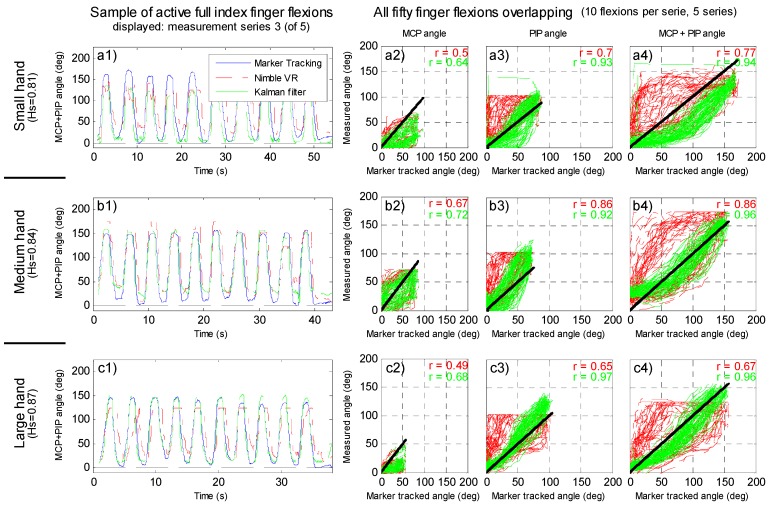
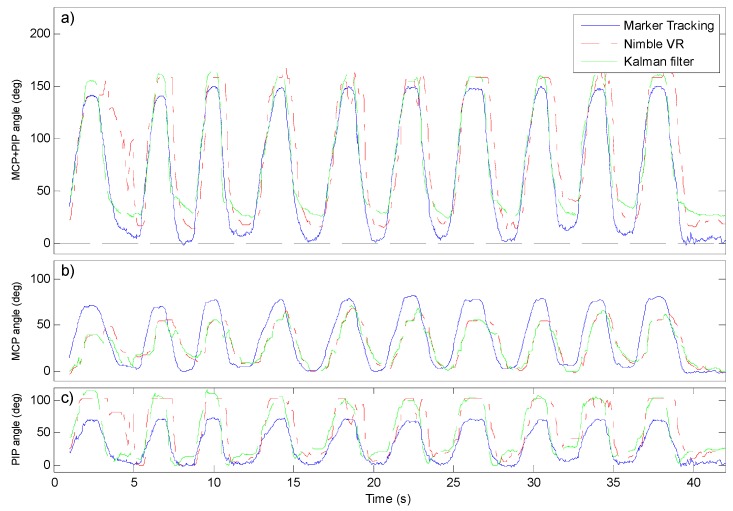
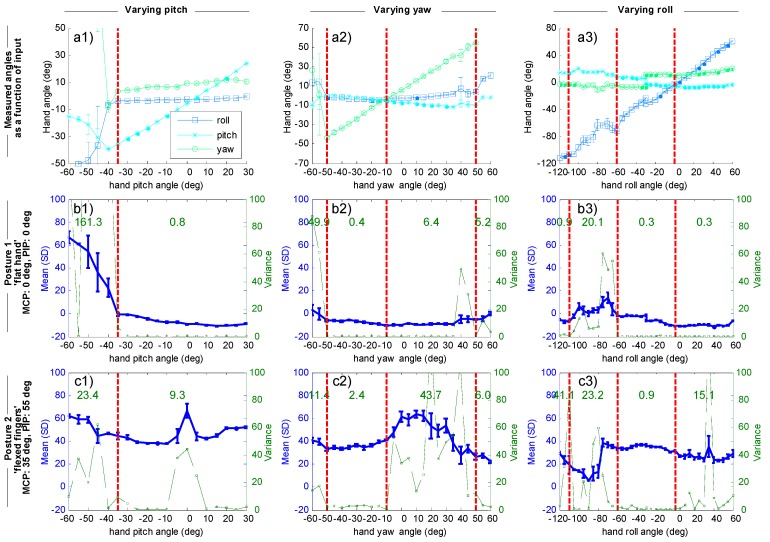
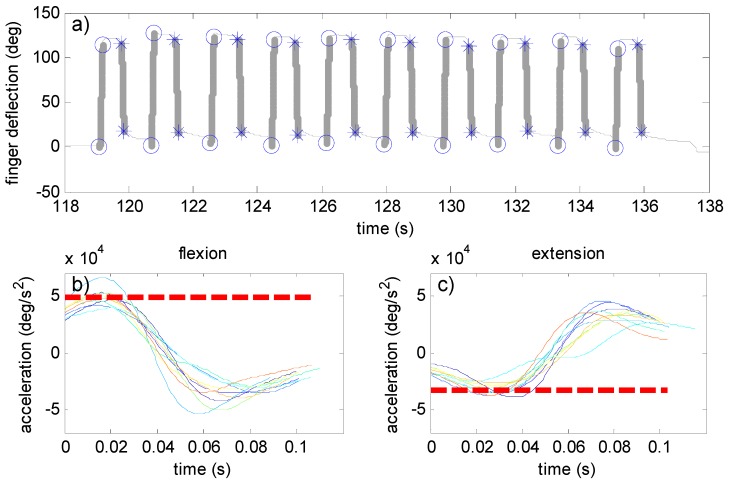
Vision based interfaces for human computer interaction have gained increasing attention over the past decade. This study presents a data fusion approach of the Nimble VR vision based system, using the Kinect camera, with the contact based 5DT Data Glove. Data fusion was achieved through a Kalman filter. The Nimble VR and filter output were compared using measurements performed on (1) a wooden hand model placed in various static postures and orientations; and (2) three differently sized human hands during active finger flexions. Precision and accuracy of joint angle estimates as a function of hand posture and orientation were determined. Moreover, in light of possible self-occlusions of the fingers in the Kinect camera images, data completeness was assessed. Results showed that the integration of the Data Glove through the Kalman filter provided for the proximal interphalangeal (PIP) joints of the fingers a substantial improvement of 79% in precision, from 2.2 deg to 0.9 deg. Moreover, a moderate improvement of 31% in accuracy (being the mean angular deviation from the true joint angle) was established, from 24 deg to 17 deg. The metacarpophalangeal (MCP) joint was relatively unaffected by the Kalman filter. Moreover, the Data Glove increased data completeness, thus providing a substantial advantage over the sole use of the Nimble VR system.
在过去十年中,基于视觉的人机交互界面越来越受到关注。本研究提出了一种基于Nimble VR视觉系统的数据融合方法,该系统使用Kinect摄像头,并结合基于接触的5DT数据手套。数据融合通过卡尔曼滤波器实现。使用在(1)放置在各种静态姿势和方位的木制手部模型上以及(2)主动手指弯曲过程中的三只不同大小的人手进行的测量,对Nimble VR和滤波器输出进行了比较。确定了作为手部姿势和方位函数的关节角度估计的精度和准确性。此外,鉴于Kinect相机图像中手指可能存在的自我遮挡,评估了数据完整性。结果表明,通过卡尔曼滤波器集成数据手套,手指的近端指间(PIP)关节精度有了79%的显著提高,从2.2度提高到0.9度。此外,准确性(即与真实关节角度的平均角度偏差)有了31%的适度提高,从24度降至17度。掌指(MCP)关节受卡尔曼滤波器的影响相对较小。此外,数据手套提高了数据完整性,因此与单独使用Nimble VR系统相比具有显著优势。