Mooney Luke M, Herr Hugh M
Center for Extreme Bionics, MIT Media Lab, Massachusetts Institute of Technology, Cambridge, MA, USA.
J Neuroeng Rehabil. 2016 Jan 28;13:4. doi: 10.1186/s12984-016-0111-3.
Ankle exoskeletons can now reduce the metabolic cost of walking in humans without leg disability, but the biomechanical mechanisms that underlie this augmentation are not fully understood. In this study, we analyze the energetics and lower limb mechanics of human study participants walking with and without an active autonomous ankle exoskeleton previously shown to reduce the metabolic cost of walking.
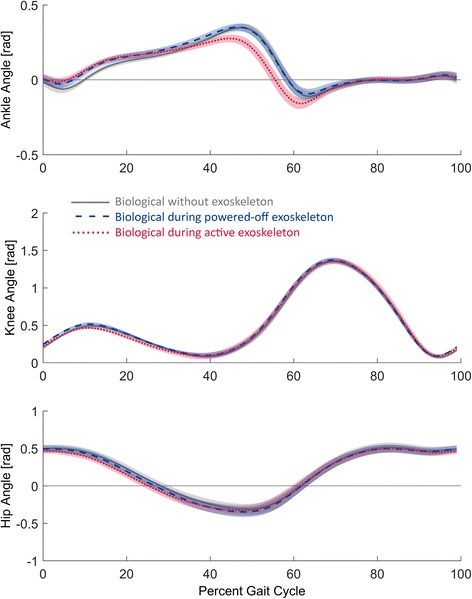
We measured the metabolic, kinetic and kinematic effects of wearing a battery powered bilateral ankle exoskeleton. Six participants walked on a level treadmill at 1.4 m/s under three conditions: exoskeleton not worn, exoskeleton worn in a powered-on state, and exoskeleton worn in a powered-off state. Metabolic rates were measured with a portable pulmonary gas exchange unit, body marker positions with a motion capture system, and ground reaction forces with a force-plate instrumented treadmill. Inverse dynamics were then used to estimate ankle, knee and hip torques and mechanical powers.
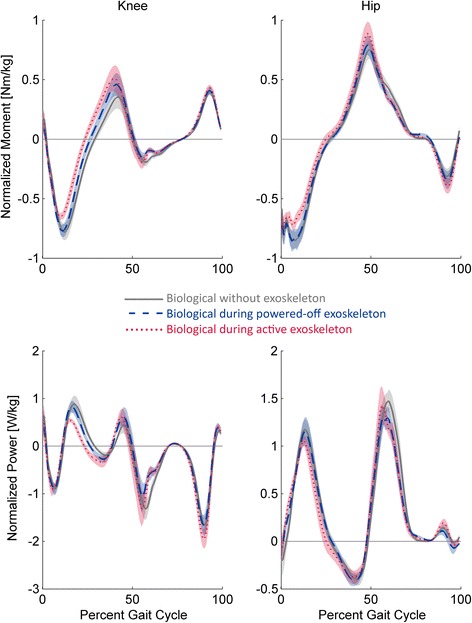
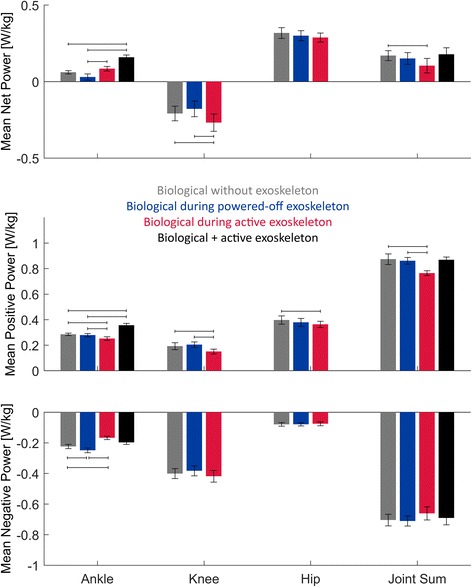
The active ankle exoskeleton provided a mean positive power of 0.105 ± 0.008 W/kg per leg during the push-off region of stance phase. The net metabolic cost of walking with the active exoskeleton (3.28 ± 0.10 W/kg) was an 11 ± 4 % (p = 0.019) reduction compared to the cost of walking without the exoskeleton (3.71 ± 0.14 W/kg). Wearing the ankle exoskeleton significantly reduced the mean positive power of the ankle joint by 0.033 ± 0.006 W/kg (p = 0.007), the knee joint by 0.042 ± 0.015 W/kg (p = 0.020), and the hip joint by 0.034 ± 0.009 W/kg (p = 0.006).
This study shows that the ankle exoskeleton does not exclusively reduce positive mechanical power at the ankle joint, but also mitigates positive power at the knee and hip. Furthermore, the active ankle exoskeleton did not simply replace biological ankle function in walking, but rather augmented the total (biological + exoskeletal) ankle moment and power. This study underscores the need for comprehensive models of human-exoskeleton interaction and global optimization methods for the discovery of new control strategies that optimize the physiological impact of leg exoskeletons.
踝关节外骨骼现已能够降低无腿部残疾人群行走时的代谢成本,但其背后的生物力学机制尚未完全明晰。在本研究中,我们分析了此前已证实可降低行走代谢成本的主动式自主踝关节外骨骼在人体研究参与者行走时的能量学和下肢力学情况。
我们测量了佩戴电池供电的双侧踝关节外骨骼所产生的代谢、动力学和运动学效应。六名参与者在水平跑步机上以1.4米/秒的速度行走,共三种情况:不佩戴外骨骼、佩戴处于开启状态的外骨骼、佩戴处于关闭状态的外骨骼。使用便携式肺气体交换装置测量代谢率,使用运动捕捉系统测量身体标记点位置,使用装有测力板的跑步机测量地面反作用力。然后运用逆动力学估算踝关节、膝关节和髋关节的扭矩及机械功率。
在站立期的蹬离阶段,主动式踝关节外骨骼每条腿平均提供0.105±0.008瓦/千克的正功率。佩戴主动式外骨骼行走时的净代谢成本(3.28±0.10瓦/千克)相较于不佩戴外骨骼行走时的成本(3.71±0.14瓦/千克)降低了11±4%(p=0.019)。佩戴踝关节外骨骼显著降低了踝关节的平均正功率,降低幅度为0.033±0.006瓦/千克(p=0.007),膝关节降低了0.042±0.015瓦/千克(p=0.020),髋关节降低了0.034±0.009瓦/千克(p=0.006)。
本研究表明,踝关节外骨骼不仅能降低踝关节的正机械功率,还能减轻膝关节和髋关节的正功率。此外,主动式踝关节外骨骼并非简单地替代行走时的生物踝关节功能,而是增强了总的(生物+外骨骼)踝关节力矩和功率。本研究强调了建立人体-外骨骼相互作用综合模型以及采用全局优化方法来发现新控制策略以优化腿部外骨骼生理影响的必要性。